Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [6x] - Zobrazit | Nadstandardní komentář [3x] - Skrýt | Definice [3x] - Skrýt |
d’Alembertův princip
Autorem tohoto principu je Jean Le Rond d’Alembert (1717 - 1783), který tento princip publikoval v roce 1742.
Systém ![]() hmotných bodů se vyvíjí takovým způsobem, že platí:
hmotných bodů se vyvíjí takovým způsobem, že platí:
| (9) |
kde ![]() jsou složky tzv. virtuálního posunutí.
jsou složky tzv. virtuálního posunutí.
Rovnicí (9) tak vlastně d’Alembert přeformuloval Newtonovu mechaniku pomocí nového přístupu. Základní představa byla taková, že virtuální posunutí jsou nekonečně malá posunutí, která jsou v souladu s vazbami ![]() . Složka
. Složka ![]() virtuálního posunutí tak vlastně odpovídá změně polohy hmotného bodu, tj. odpovídá změně souřadnice
virtuálního posunutí tak vlastně odpovídá změně polohy hmotného bodu, tj. odpovídá změně souřadnice ![]() .
.
Pokud tedy rovnice (9) platí pro všechna ![]() , odpovídají složky sil
, odpovídají složky sil ![]() složkám zrychlení
složkám zrychlení ![]() a pohyb hmotného bodu lze uskutečnit. Na základě
a pohyb hmotného bodu lze uskutečnit. Na základě ![]() můžeme určit polohu hmotného bodu v čase a můžeme tak konstruovat jeho trajektorii implicitním způsobem.
můžeme určit polohu hmotného bodu v čase a můžeme tak konstruovat jeho trajektorii implicitním způsobem.
Rovnice (9) je tedy splněna tehdy, pokud složky sil ![]() a složky zrychlení
a složky zrychlení ![]() jsou vzájemně dobře nastaveny.
jsou vzájemně dobře nastaveny.
Virtuální posunutí se složkami ![]() je pojem, který zavedl d’Alembert a jeho kolegové. Z hlediska současné interpretace lze na virtuální posunutí nahlížet jako na tečný vektor
je pojem, který zavedl d’Alembert a jeho kolegové. Z hlediska současné interpretace lze na virtuální posunutí nahlížet jako na tečný vektor ![]() , který je sestrojen v daném bodě P plochy k této ploše, po níž se hmotný bod pohybuje. Jedná se o tzv. konfigurační prostor Q, který je popsán rovnicí
, který je sestrojen v daném bodě P plochy k této ploše, po níž se hmotný bod pohybuje. Jedná se o tzv. konfigurační prostor Q, který je popsán rovnicí ![]() . Všechny uvažované tečné vektory pak leží v tečné rovině
. Všechny uvažované tečné vektory pak leží v tečné rovině ![]() sestrojené v bodě P (viz obr. 12). Proto platí
sestrojené v bodě P (viz obr. 12). Proto platí ![]() .
.
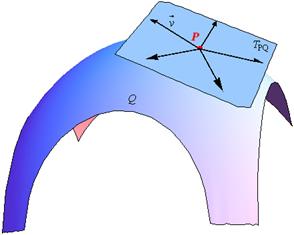 |
| Obr. 12 |
Každý bod konfiguračního prostoru Q má svůj tečný prostor - tečnou rovinu ![]() .
.
Konfigurační prostor tedy je plochou vazby popsané rovnicí ![]() . V něm leží ty body, v nichž se může pohybující se hmotný bod nacházet.
. V něm leží ty body, v nichž se může pohybující se hmotný bod nacházet.
V rovnici (9) tedy testujeme výchylku hmotného bodu z bodu, v němž se právě nachází, do všech tečných směrů popsaných tečnými vektory ![]() ležícími v
ležícími v ![]() .
.
d’Alembertův princip je ekvivalentní Lagrangeovým rovnicím I. druhu (viz rovnice (7) a (8)) a tedy je ekvivalentní i Newtonovým rovnicím s (holonomními) vazbami.
Toto tvrzení lze dokázat.
Nejdříve dokážeme implikaci, že z Lagrangeových rovnic I. druhu (tj. ze vztahů (7) a (8)) vyplývá d’Alembertův princip (vztah (9)).
Rovnici ![]() upravíme na tvar
upravíme na tvar ![]() a vynásobíme složkou virtuálního posunutí
a vynásobíme složkou virtuálního posunutí ![]() a sečteme:
a sečteme: ![]() . Nyní zaměníme pořadí sčítání na pravé straně rovnice
. Nyní zaměníme pořadí sčítání na pravé straně rovnice ![]() . Pokud uvědomíme, že
. Pokud uvědomíme, že ![]() je složka gradientu
je složka gradientu ![]() a
a ![]() je složka tečného vektoru, můžeme psát
je složka tečného vektoru, můžeme psát ![]() . Gradient plochy
. Gradient plochy ![]() má ovšem směr normály k této ploše (viz vztah (4)) a je tedy kolmý k tečně (resp. k tečné rovině) v daném bodě. Je tedy kolmý i k tečnému vektoru
má ovšem směr normály k této ploše (viz vztah (4)) a je tedy kolmý k tečně (resp. k tečné rovině) v daném bodě. Je tedy kolmý i k tečnému vektoru ![]() a jejich skalární součin je nulový. Proto
a jejich skalární součin je nulový. Proto ![]() .
.
Důkaz obrácené implikace, tj. že ze vztahu (9) vyplývají vztahy (7) a (8) provedeme úvahou. Uvážíme dva případy:
1. neexistuje vazba - to znamená, že složky virtuálního posunutí ![]() jsou navzájem nezávislé a tedy
jsou navzájem nezávislé a tedy ![]() pro všechna i od 1 do 3N;
pro všechna i od 1 do 3N;
2. existují vazby - to znamená, že složky virtuálního posunutí ![]() obecně nejsou navzájem nezávislé. Metodou Lagrangeových multiplikátorů lze dokázat, že musí existovat systém 3N + v rovnic, které splňují podmínky (7) a (8).
obecně nejsou navzájem nezávislé. Metodou Lagrangeových multiplikátorů lze dokázat, že musí existovat systém 3N + v rovnic, které splňují podmínky (7) a (8).
Fakt, že složky ![]() nejsou obecně nezávislé si lze představit následující úvahou: když jdeme ze schodů, jdeme dopředu, ale zároveň jdeme dolů. Tj. díky existenci vazby (schody) nemůže naše rychlost mířit libovolným směrem. Složky
nejsou obecně nezávislé si lze představit následující úvahou: když jdeme ze schodů, jdeme dopředu, ale zároveň jdeme dolů. Tj. díky existenci vazby (schody) nemůže naše rychlost mířit libovolným směrem. Složky ![]() jsou složkami tečných vektorů. A vektor rychlosti je k dané ploše vždy tečný.
jsou složkami tečných vektorů. A vektor rychlosti je k dané ploše vždy tečný.
Metoda Lagrangeových multiplikátorů se používá v matematické analýze při hledání vázaných extrémů funkcí více proměnných.
Rovnice (9) platí jen pro vratná virtuální posunutí ![]() , tj. taková posunutí, že k posunutí
, tj. taková posunutí, že k posunutí ![]() existuje také posunutí
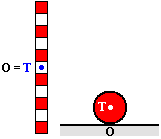
existuje také posunutí ![]() . V případě oboustranných vazeb jsou všechna posunutí vratná. V případě jednostranných vazeb by vratná posunutí byla jen dvě - viz obr. 13, na kterém jsou zakreslena vratná posunutí
. V případě oboustranných vazeb jsou všechna posunutí vratná. V případě jednostranných vazeb by vratná posunutí byla jen dvě - viz obr. 13, na kterém jsou zakreslena vratná posunutí ![]() a
a ![]() . (Obrázek je schématický a platí i pro zakřivené vazbové plochy nikoliv jen pro rovinu.)
. (Obrázek je schématický a platí i pro zakřivené vazbové plochy nikoliv jen pro rovinu.)
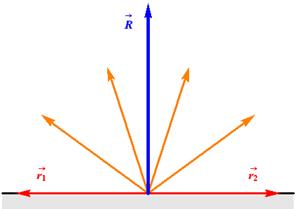 |
| Obr. 13 |
Pokud bychom v případě jednostranných vazeb uvažovali i nevratná virtuální posunutí, změnil by se tvar d’Alembertova principu (9) na tvar
| (10) |
Na základě vztahu (9) lze najít i dva speciální případy d’Alembertova principu:
1. není žádná vazba - to znamená, že složky virtuálního posunutí ![]() jsou libovolné a na sobě navzájem nezávislé. Vztah (9) pak lze psát ve tvaru
jsou libovolné a na sobě navzájem nezávislé. Vztah (9) pak lze psát ve tvaru
| (11) |
pro všechna ![]() . Získáme tak 3N na sobě nezávislých Newtonových rovnic.
. Získáme tak 3N na sobě nezávislých Newtonových rovnic.
2. není žádný pohyb - to znamená, že ![]() pro všechna
pro všechna ![]() a tedy platí
a tedy platí
| (12) |
Občas je vhodné takovou situaci (tj. silové působení bez pohybu) studovat: stabilita mostů, statické konstrukce (např. vysílačů, stožárů vysokého napětí, …) a podobně.
Vztah (12) definuje princip virtuální práce, která by se vykonala, kdyby se hmotný bod vychýlil ze svého rovnovážného stavu.
Tento poznatek odvodil Johann Bernoulli (1667 - 1748) v roce 1717, ale základy principu virtuální práce byly známy již od starověku.
Na základě vztahu (12) lze právě rovnovážný stav poznat: vztah (12) totiž v rovnovážném stavu musí platit pro všechna virtuální posunutí.
Je-li těleso v rovnovážném stavu (viz obr. 14), tak ať ho vychýlíme jakýmkoliv směrem, který vazby systému umožňují, tak se vždy vrátí do rovnovážného stavu. V případě nerovnovážného stavu (viz obr. 15) to neplatí.
V případě určitého typu sil se situace zjednoduší. Tyto síly se nazývají konzervativní síly.
Pro konzervativní síly platí
| (13) |
To ovšem znamená, že potenciální energie může mít extrém - existují tedy tři možnosti:
1. potenciální energie nabývá minima - jedná se o stabilní rovnovážnou polohu (viz obr. 14);
2. potenciální energie nabývá maxima - jedná se o labilní rovnovážnou polohu (viz obr. 15);
3. potenciální energie nemá extrém - jedná se o indiferentní rovnovážnou polohu (viz obr. 16).
Podmínka (13) udává podmínku rovnováhy, ale není možné usoudit o jaký z právě uvedených tří možných případů se jedná.
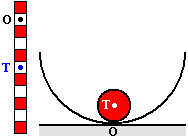 | 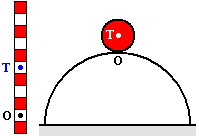 |  |
| Obr. 14 | Obr. 15 | Obr. 16 |
Symbol ![]() se používá z historických důvodů a lze místo něj psát totální diferenciál
se používá z historických důvodů a lze místo něj psát totální diferenciál ![]() .
.
Příklad: Rovnováha tyčky mezi stěnou a hranou
Homogenní tyč délky 2l je umístěna mezi stěnou a hranou, které jsou ve vzájemné vzdálenosti a. Při jaké poloze bude tyč v rovnovážné poloze?
Řešení: K řešení využijeme d’Alembertův princip v jeho speciální podobě podle vztahu (12). Hledáme rovnovážnou polohu, tj. stav systému (tyče) bez rotace a posunutí - budeme tedy uvažovat pouze jedinou sílu, která na tyč působí: gravitační sílu ![]() (viz obr. 17). Na základě této úvahy a vztahu (12) lze psát
(viz obr. 17). Na základě této úvahy a vztahu (12) lze psát ![]() , tj.
, tj. ![]() a po dosazení:
a po dosazení: ![]() . Odtud získáme
. Odtud získáme ![]() . To znamená, že rovhovážná poloha nastává tehdy, pokud se y-ová souřadnice polohy těžiště nemění.
. To znamená, že rovhovážná poloha nastává tehdy, pokud se y-ová souřadnice polohy těžiště nemění.
Představíme-li si pohyb tyče v souladu s danými vazbami, tak se její těžiště bude pohybovat po části kružnice. V místě, kde nastává rovnováha, se y-ová souřadnice jeho polohy skutečně nemění.
Polohu tyče je dobré popsat pomocí úhlu ![]() , který svírá tyč s kladnou částí osy x. Pak lze pro y-ovou souřadnici těžiště, která je závislá na úhlu
, který svírá tyč s kladnou částí osy x. Pak lze pro y-ovou souřadnici těžiště, která je závislá na úhlu ![]() , psát:
, psát: ![]() . Proto
. Proto ![]() . Vzhledem k tomu, že má platit
. Vzhledem k tomu, že má platit ![]() pro všechna
pro všechna ![]() , musí být
, musí být ![]() . Odtud získáme, že
. Odtud získáme, že ![]() .
.
Tyč je v rovnovážné poloze, svírá-li s vodorovným směrem úhel ![]() , který je dán vztahem
, který je dán vztahem ![]() .
.
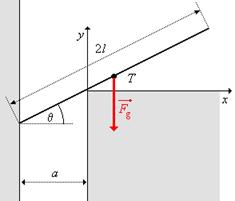 |
| Obr. 17 |