Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [4x] - Skrýt | Nadstandardní komentář [4x] - Zobrazit | Definice [1x] - Skrýt |
Zavedení úhlové rychlosti
Uvažujme libovolný časově závislý vektor ![]() , který budeme zkoumat jak v pevné bázi
, který budeme zkoumat jak v pevné bázi ![]() , tak v korotující bázi
, tak v korotující bázi ![]() .
.
Korotující báze ![]() je skutečně závislá na čase, neboť rotuje spolu s tuhým tělesem.
je skutečně závislá na čase, neboť rotuje spolu s tuhým tělesem.
Souřadnice ![]() resp.
resp. ![]() vektoru
vektoru ![]() můžeme vyjádřit v obou uvažovaných bázích pomocí vztahů
můžeme vyjádřit v obou uvažovaných bázích pomocí vztahů
| (229) |
resp.
| (230) |
Ve vztahu (230) se mění v závislosti na čase jak souřadnice uvažovaného vektoru, tak vektory korotující báze. Pro bázové vektory obou bází přitom platí vztahy
| (231) |
a dále platí
| (232) |
Vztahy (231) a (232) jsou analogické jako vztahy (226) a (227) jsou jen přepsány ve vhodných indexech pro další odvozování. Pro časovou změnu vektoru ![]() vůči pevnému inerciálnímu systému můžeme postupně psát:
vůči pevnému inerciálnímu systému můžeme postupně psát:
| (233) |
Vektor ![]() popisujeme vzhledem k pevnému inerciálnímu systému, ale vyjádřili jsme ho jak z hlediska pevné báze, tak z hlediska korotující báze.
popisujeme vzhledem k pevnému inerciálnímu systému, ale vyjádřili jsme ho jak z hlediska pevné báze, tak z hlediska korotující báze.
Byly by další dvě možnosti, jak situaci vyšetřovat: definovat vektor vzhledem k soustavě, která se pohybuje spolu s tuhým tělesem a vyjádřit ho jak v korotující bázi (její vektory by se v čase neměnily), tak v pevné bázi, jejíž vektory by se tentokráte měnily. Vztažná soustava by se totiž vůči pevné bázi pohybovala.
S využitím obou vztahů (231), můžeme vztah (233) přepsat ve tvaru ![]() . Dostáváme tedy vztah
. Dostáváme tedy vztah
| (234) |
v němž jsme označili
| (235) |
Vztah (235) lze též zapsat v ekvivalentním tvaru
| (236) |
zavedli jsme tedy matici ![]() s prvky
s prvky ![]() definovanými vztahem (235).
definovanými vztahem (235).
Důvod, proč je matice značená bez čárky a její prvky s čárkou, bude vysvětlen později.
Lze vyslovit následující tvrzení:
Matice ![]() je antisymetrická.
je antisymetrická.
Toto tvrzení snadno dokážeme. Prvky matice ![]() splňují relace ortogonality (232), neboť na základě nich byla matice
splňují relace ortogonality (232), neboť na základě nich byla matice ![]() odvozena. Časovou derivací vztahu (232) dostaneme
odvozena. Časovou derivací vztahu (232) dostaneme ![]() , odkud vyjádříme
, odkud vyjádříme ![]() . Vzhledem k symetričnosti matice A můžeme psát
. Vzhledem k symetričnosti matice A můžeme psát ![]() a na základě vztahu (235) dostaneme
a na základě vztahu (235) dostaneme ![]() , což znamená, že matice
, což znamená, že matice ![]() je antisymetrická a má tedy jen tři nezávislé prvky. Podle právě odvozeného vztahu je zřejmé, že na hlavní diagonále matice
je antisymetrická a má tedy jen tři nezávislé prvky. Podle právě odvozeného vztahu je zřejmé, že na hlavní diagonále matice ![]() jsou nuly, takže zbývá určit její tři nezávislé prvky. Ostatní tři jsou již jednoznačně určeny - jsou to opačná čísla k číslům vyjadřující ony tři nezávislé prvky uvažované matice.
jsou nuly, takže zbývá určit její tři nezávislé prvky. Ostatní tři jsou již jednoznačně určeny - jsou to opačná čísla k číslům vyjadřující ony tři nezávislé prvky uvažované matice.
Proto můžeme provést tzv. přirozené mapování (přirozené zobrazení, operaci duality), při kterém antisymetrické matici přiřadíme vektor ![]() se složkami:
se složkami:
| (237) |
kde ![]() je Lewi-Civitův symbol (Lewi-Civitův tenzor). Provedeme-li naznačený součet podle proměnné k, dostaneme
je Lewi-Civitův symbol (Lewi-Civitův tenzor). Provedeme-li naznačený součet podle proměnné k, dostaneme
| (238) |
Pro i-tou složku vektoru ![]() můžeme totiž psát
můžeme totiž psát ![]() , přičemž jsme nepsali ty členy, které rovnou obsahují dva stejné indexy (např.
, přičemž jsme nepsali ty členy, které rovnou obsahují dva stejné indexy (např. ![]() ). Lewi-Civitiův symbol, který má dva indexy stejné, je totiž nulový.
). Lewi-Civitiův symbol, který má dva indexy stejné, je totiž nulový.
Vektor ![]() definovaný vztahem (237) je vektor úhlové rychlosti otáčení tuhého tělesa.
definovaný vztahem (237) je vektor úhlové rychlosti otáčení tuhého tělesa.
K vektoru ![]() je nutné uvést několik poznámek:
je nutné uvést několik poznámek:
1. ![]() je duální pseudovektor a to proto, že přirozené mapování provedené vztahem (237) (tj. definice jednotlivých složek vektoru
je duální pseudovektor a to proto, že přirozené mapování provedené vztahem (237) (tj. definice jednotlivých složek vektoru ![]() ) není jednoznačné: při změně levotočivé báze na pravotočivou bázi (nebo naopak) se změní znaménka jeho souřadnic. Tato změna znamének by ale neměla nastávat často - ve fyzice se k popisu pohybujících se hmotných bodů a těles používá levotočivý kartézský systém souřadnic (tj. ten, který má osy x, y a z orientovány podle pravidla pravé ruky). Skutečnost, že
) není jednoznačné: při změně levotočivé báze na pravotočivou bázi (nebo naopak) se změní znaménka jeho souřadnic. Tato změna znamének by ale neměla nastávat často - ve fyzice se k popisu pohybujících se hmotných bodů a těles používá levotočivý kartézský systém souřadnic (tj. ten, který má osy x, y a z orientovány podle pravidla pravé ruky). Skutečnost, že ![]() je pseudovektor vyplývá z toho, že i Levi-Civitův symbol
je pseudovektor vyplývá z toho, že i Levi-Civitův symbol ![]() je pseudovektor.
je pseudovektor.
2. Přiřazení pomocí vztahu (237) lze korektně provést jen ve trojrozměrném prostoru, neboť matice ![]() má tři nezávislé prvky a vektor
má tři nezávislé prvky a vektor ![]() má také tři nezávislé složky.
má také tři nezávislé složky.
V teorii relativity, v teorii elektromagnetického pole a dalších oborech fyziky je nutné popisované přiřazení provést tak, že matici přiřadíme matici (nikoliv vektor).
3. Vektor ![]() má složky definované vůči korotující bázi
má složky definované vůči korotující bázi ![]() , proto jsou jeho složky i prvky matice
, proto jsou jeho složky i prvky matice ![]() označeny symboly
označeny symboly ![]() resp.
resp. ![]() .
.
Tím je vysvětlen zdánlivý rozpor ve značení ve vztazích (235) a (236).
Analogicky lze vytvořit z vektoru matici, tj. napsat ke vztahu (237) duální vztah ve tvaru
| (239) |
Ve vztahu (239) ve srovnání se vztahem (237) chybí činitel 0,5. To proto, že na levé straně vztahu (239) je veličina indexovaná dvěma indexy a existuje tedy jediná možnost přiřazení.
Nyní budeme pokračovat v úpravě vztahu (234), ve kterém nejdříve provedeme záměnu indexů: ![]() .
.
Tato úprava se používá proto, aby se zpřehlednil zápis daného vztahu nebo aby se sjednotilo značení indexů u veličin, které spolu souvisejí.
Dosazením ze vztahu (239) získáme ![]() . Provedením cyklické záměny indexů Levi-Civitova symbolu dostaneme
. Provedením cyklické záměny indexů Levi-Civitova symbolu dostaneme ![]() . Souřadnici
. Souřadnici ![]() vektoru
vektoru ![]() můžeme v daném součinu umístit na jakékoliv místo, neboť
můžeme v daném součinu umístit na jakékoliv místo, neboť ![]() je složka vektoru (tedy číslo). Další úpravou je využití definice vektorového součinu:
je složka vektoru (tedy číslo). Další úpravou je využití definice vektorového součinu:
| (240) |
Tento vztah popisuje časovou derivaci libovolného vektoru ![]() vzhledem ke zvolenému inerciálnímu systému v prostoru vyjádřenou v korotující bázi
vzhledem ke zvolenému inerciálnímu systému v prostoru vyjádřenou v korotující bázi ![]() . V právě uvedeném vztahu popisuje člen
. V právě uvedeném vztahu popisuje člen ![]() změnu vektoru
změnu vektoru ![]() , jehož souřadnice jsou definovány vztahy (229) a (230), vůči korotující bázi
, jehož souřadnice jsou definovány vztahy (229) a (230), vůči korotující bázi ![]() a člen
a člen ![]() odpovídá přechodu mezi dvěma bázemi při popisu uvažovaného tuhého tělesa rotujícího úhlovou rychlostí
odpovídá přechodu mezi dvěma bázemi při popisu uvažovaného tuhého tělesa rotujícího úhlovou rychlostí ![]() .
.
Platí-li daný vztah mezi určitými vektory v jedné bázi, platí v každé bázi. Proto můžeme psát
| (241) |
bez ohledu na konkrétní bázi.
Tento vztah je velmi důležitý, a proto vyžaduje několik komentářů:
1. ![]() a
a ![]() jsou dva různé vektory, nikoliv jeden vektor vyjádřený v různých bázích;
jsou dva různé vektory, nikoliv jeden vektor vyjádřený v různých bázích;
2. pokud zvolíme ![]() , kde
, kde ![]() je polohový vektor popisující polohu objektu na rotujícím tuhém tělesu, pak člen
je polohový vektor popisující polohu objektu na rotujícím tuhém tělesu, pak člen ![]() definuje rychlost pohybu hmotného bodu na tuhém tělese vůči vnějšímu pozorovateli;
definuje rychlost pohybu hmotného bodu na tuhém tělese vůči vnějšímu pozorovateli;
3. při stejné volbě pak člen ![]() definuje rychlost pohybu hmotného bodu na tuhém tělese vůči tomuto tuhému tělesu
definuje rychlost pohybu hmotného bodu na tuhém tělese vůči tomuto tuhému tělesu
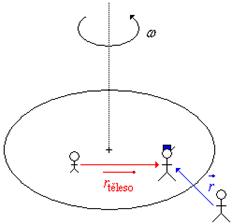 |
| Obr. 60 |
Můžeme si představit situaci zobrazenou na obr. 60. Po kolotoči se pohybuje technik a jeho pohyb pozoruje dítě na kolotoči i pozorovatel mimo kolotoč. Dítě na kolotoči vnímá pouze vlastní pohyb technika vůči kolotoči (popsaný výrazem ![]() ), zatímco pozorovatel zvenčí vidí rotační pohyb technika na kolotoči: k tomu, co pozoruje dítě musí přidat ještě oběžný pohyb kolotoče (člen
), zatímco pozorovatel zvenčí vidí rotační pohyb technika na kolotoči: k tomu, co pozoruje dítě musí přidat ještě oběžný pohyb kolotoče (člen ![]() ve výrazu (241)).
ve výrazu (241)).
Kolotoč zobrazený na obr. 60 představuje speciální otáčení: otáčení s pevnou osou (rotace s pevnou osou).