Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [3x] - Zobrazit | Nadstandardní komentář [0x] | Definice [0x] |
Popis rotace tuhého tělesa - Eulerovy kinematické rovnice
Pro korektní popis rotace tuhého tělesa (resp. natočení tuhého tělesa) kolem dané osy je nutné zavést tři nezávislé parametry. Počet těchto parametrů vyplývá ze symetrie matice ortogonality. Těmito třemi parametry jsou tzv. Eulerovy úhly, jejichž funkce pak vystupují v matici ortogonality A a v matici ![]() definující úhlovou rychlost otáčení tuhého tělesa. Budeme postupovat tak, abychom dokázali, že libovolné natočení tuhého tělesa lze složit ze tří otočení kolem vhodných os. A každé z těchto tří otočení je popsáno jedním z Eulerových úhlů.
definující úhlovou rychlost otáčení tuhého tělesa. Budeme postupovat tak, abychom dokázali, že libovolné natočení tuhého tělesa lze složit ze tří otočení kolem vhodných os. A každé z těchto tří otočení je popsáno jedním z Eulerových úhlů.
 |  |
| Obr. 61 | Obr. 62 |
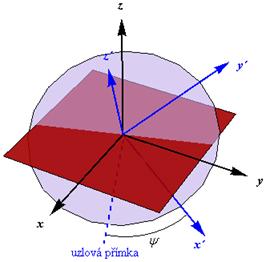
obr. 63
Uzlová přímka zobrazená na obr. 63 vyznačuje původní polohu osy ![]() z obr. 62.
z obr. 62.
Švýcarský matematik a fyzik Leonhard Paul Euler (1707 - 1783) se snažil popsat setrvačníky, a proto volil úhly popisující rotaci setrvačníku (a obecně tuhého tělesa) takto:
1. precesní úhel ![]() - charakterizuje otočení kolem osy z (resp.
- charakterizuje otočení kolem osy z (resp. ![]() ) kartézského systému souřadnic a je z intervalu
) kartézského systému souřadnic a je z intervalu ![]() ;
;
2. nutační úhel ![]() - charakterizuje otočení kolem osy
- charakterizuje otočení kolem osy ![]() (resp.
(resp. ![]() ), což je nová poloha osy x (resp.
), což je nová poloha osy x (resp. ![]() ) po předchozích otočeních; je z intervalu
) po předchozích otočeních; je z intervalu ![]() ;
;
3. rotační úhel ![]() - charakterizuje otočení kolem nové polohy osy z (resp.
- charakterizuje otočení kolem nové polohy osy z (resp. ![]() ) a je z intervalu
) a je z intervalu ![]() .
.
Úhel ![]() charakterizuje vlastní rotaci tuhého tělesa kolem jeho osy, která splývá s osou z. Úhel
charakterizuje vlastní rotaci tuhého tělesa kolem jeho osy, která splývá s osou z. Úhel ![]() charakterizuje odchylku vlastní osy tuhého tělesa (kolem níž tuhé těleso rotuje) od svislého směru a úhel
charakterizuje odchylku vlastní osy tuhého tělesa (kolem níž tuhé těleso rotuje) od svislého směru a úhel ![]() určuje natočení tzv. uzlové přímky. Úhly
určuje natočení tzv. uzlové přímky. Úhly ![]() a
a ![]() tak jednoznačně určují polohu osy tuhého tělesa, kolem níž těleso rotuje.
tak jednoznačně určují polohu osy tuhého tělesa, kolem níž těleso rotuje.
Úhly ![]() a
a ![]() mají analogický význam jako sférické souřadnice resp. zeměpisné souřadnice: úhel
mají analogický význam jako sférické souřadnice resp. zeměpisné souřadnice: úhel ![]() odpovídá zeměpisné šířce (odklon od severního pólu) a úhel
odpovídá zeměpisné šířce (odklon od severního pólu) a úhel ![]() zeměpisné délce.
zeměpisné délce.
Postup, kterým ukážeme, že libovolné natočení tuhého tělesa v prostoru lze složit z natočení charakterizovaných právě zavedenými Eulerovými úhly, aplikujeme ve třech krocích na rotaci kartézského systému souřadnic 0xyz:
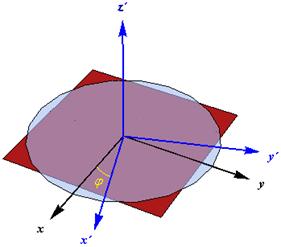
1. rotace kolem osy z (resp. ![]() ) o úhel
) o úhel ![]() (viz obr. 61) - tato rotace je popsána maticí D, která má stejný tvar jako matice daná předpisem (242)
(viz obr. 61) - tato rotace je popsána maticí D, která má stejný tvar jako matice daná předpisem (242)
 , , | (249) |
jíž přísluší vektor úhlové rychlosti ve tvaru
| (250) |
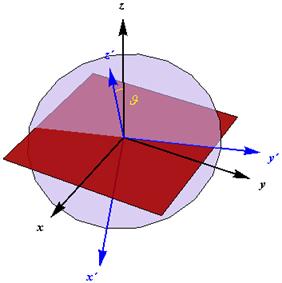
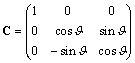
2. rotace kolem nové polohy osy y (resp. ![]() ) o úhel
) o úhel ![]() (viz obr. 62) - tato rotace je popsána maticí C ve tvaru
(viz obr. 62) - tato rotace je popsána maticí C ve tvaru
 ; ; | (251) |
této matici odpovídá vektor úhlové rychlosti ve tvaru
| (252) |
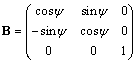
3. rotace kolem nové polohy osy z (resp. ![]() ) o úhel
) o úhel ![]() (viz obr. 63) - tato rotace je popsaná maticí B ve tvaru
(viz obr. 63) - tato rotace je popsaná maticí B ve tvaru
 , , | (253) |
které odpovídá vektor úhlové rychlosti ve tvaru
| (254) |
Na základě vztahu (246) můžeme výsledné otočení, které vznikne složením právě popsaných otočeních v uvedeném pořadí charakterizovaných maticemi (249), (251) a (253), popsat maticí A ve tvaru
| (255) |
V právě uvedeném vztahu závisí na pořadí násobení, protože násobení matic není obecně komutativní. A ani skládání otočení, které je maticemi popsáno, není obecně komutativní.
Této matici pak odpovídá vektor úhlové rychlosti ![]() , který můžeme psát s využitím vztahu (248) ve tvaru
, který můžeme psát s využitím vztahu (248) ve tvaru
| (256) |
v němž jsou vektory úhlových rychlostí ![]() a
a ![]() násobeny příslušnými maticemi proto, abychom tyto vektory vyjádřili ve správné bázi, v níž jsou definovány a mají smysl. Vektor
násobeny příslušnými maticemi proto, abychom tyto vektory vyjádřili ve správné bázi, v níž jsou definovány a mají smysl. Vektor ![]() je totiž definován v soustavě souřadnic (v bázi), která vznikne po prvním otočení. Proto jej musíme přepočítat tak, jak by vypadal po třetím otočení, aby jej bylo možné přičíst k vektoru
je totiž definován v soustavě souřadnic (v bázi), která vznikne po prvním otočení. Proto jej musíme přepočítat tak, jak by vypadal po třetím otočení, aby jej bylo možné přičíst k vektoru ![]() , který je definován v bázi, která vznikne po třetím otočení daného kartézského systému. Analogicky je nutné vektor
, který je definován v bázi, která vznikne po třetím otočení daného kartézského systému. Analogicky je nutné vektor ![]() , který je definován v původní kartézské soustavě, transformovat do soustavy souřadnic, kterou získáme po dalších dvou otočeních. Po dosazení matic (251) a (253) a vektorů (250), (252) a (254), které je nutné kvůli operacím s maticemi dosazovat v transponované podobě, do vztahu (256) dostaneme
, který je definován v původní kartézské soustavě, transformovat do soustavy souřadnic, kterou získáme po dalších dvou otočeních. Po dosazení matic (251) a (253) a vektorů (250), (252) a (254), které je nutné kvůli operacím s maticemi dosazovat v transponované podobě, do vztahu (256) dostaneme  . Provedením naznačených operací s maticemi získáme vztah
. Provedením naznačených operací s maticemi získáme vztah  . Tedy můžeme psát
. Tedy můžeme psát
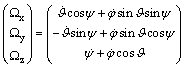 , , | (257) |
což je maticové vyjádření Eulerových kinematických rovnic v korotující bázi, která rotuje spolu s tělesem. Vektor ![]() má směr okamžité osy otáčení, kolem níž se tuhé těleso otáčí.
má směr okamžité osy otáčení, kolem níž se tuhé těleso otáčí.