Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [1x] - Skrýt | Nadstandardní komentář [2x] - Skrýt | Definice [0x] |
Odvození Lorentzovy transformace
V inerciální soustavě ![]() zvolíme bod
zvolíme bod ![]() tak, že jeho vzdálenost od počátku této soustavy (bod
tak, že jeho vzdálenost od počátku této soustavy (bod ![]() ) je
) je ![]() (viz obr. 21). Úsečka
(viz obr. 21). Úsečka ![]() o vlastní délce
o vlastní délce ![]() se vzhledem k soustavě S pohybuje rychlostí
se vzhledem k soustavě S pohybuje rychlostí ![]() ve směru osy x (resp. x´) a její délku v soustavě S lze určit podle vztahu
ve směru osy x (resp. x´) a její délku v soustavě S lze určit podle vztahu ![]() , kde x je souřadnice bodu
, kde x je souřadnice bodu ![]() v čase t a
v čase t a ![]() je souřadnice bodu
je souřadnice bodu ![]() v tomtéž okamžiku.
v tomtéž okamžiku.
Pro délku l lze psát vztah pro kontrakci délek ve tvaru ![]() , z něhož po dosazení do výše provedené úvahy dostáváme:
, z něhož po dosazení do výše provedené úvahy dostáváme: ![]() . Odtud
. Odtud  .
.
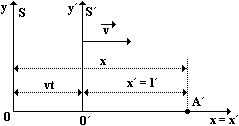 |
| Obr. 21 |
Transformační rovnice pro transformaci souřadnic y a z jsou stejné jako u Galileiho transformace, neboť tyto osy jsou kolmé na směr pohybu vztažné soustavy ![]() vzhledem k soustavě S a ke kontrakci délek nedochází. Jde tedy o speciální Lorentzovu transformaci a platí:
vzhledem k soustavě S a ke kontrakci délek nedochází. Jde tedy o speciální Lorentzovu transformaci a platí: ![]() a
a ![]() .
.
K odvození vztahu pro transformaci času použijeme principu konstantní rychlosti světla. Budeme předpokládat, že v čase ![]() , v němž se souřadnicové osy obou soustav kryjí, vyšle pozorovatel v soustavě S světelný signál v kladném směru osy x (viz obr. 22). Za dobu t dorazí světlo do bodu B o souřadnici
, v němž se souřadnicové osy obou soustav kryjí, vyšle pozorovatel v soustavě S světelný signál v kladném směru osy x (viz obr. 22). Za dobu t dorazí světlo do bodu B o souřadnici ![]() (B má tedy v soustavě S souřadnice x a t). V soustavě
(B má tedy v soustavě S souřadnice x a t). V soustavě ![]() urazí světlo dráhu
urazí světlo dráhu ![]() a bod B´ odpovídající bodu B má tedy souřadnice
a bod B´ odpovídající bodu B má tedy souřadnice ![]() a
a ![]() . Z těchto rovnic a Lorentzova vztahu pro transformaci souřadnice x dostáváme:
. Z těchto rovnic a Lorentzova vztahu pro transformaci souřadnice x dostáváme: 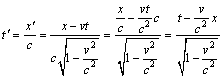 , což je Lorentzův vztah pro transformaci času.
, což je Lorentzův vztah pro transformaci času.
Předposlední a poslední úpravy výše uvedeného vztahy působí poněkud uměle, ale cílem je, aby transformace souřadnice a času měly „podobné“ tvary. Jak souřadnice ![]() , tak souřadnice
, tak souřadnice ![]() nyní závisejí na souřadnici x a t.
nyní závisejí na souřadnici x a t.
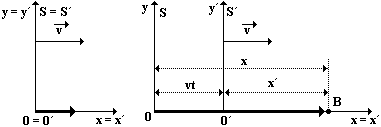 |
| Obr. 22 |
Význam Lorentzovy transformace spočívá v tom, že známe-li v inerciální soustavě S souřadnice události x, y, z, t, lze získat souřadnice ![]() ,
, ![]() ,
, ![]() ,
, ![]() téže události v libovolné jiné soustavě souřadnic. Pomocí této transformace lze odvodit skutečnost, že relativnost současnosti, ale také vztahy pro dilataci času a kontrakci délek.
téže události v libovolné jiné soustavě souřadnic. Pomocí této transformace lze odvodit skutečnost, že relativnost současnosti, ale také vztahy pro dilataci času a kontrakci délek.
Podle principu relativity jsou všechny inerciální vztažné soustavy rovnocenné, a proto Lorentzova transformace musí platit pro přechod mezi libovolnými dvěma vztažnými inerciálními soustavami. Tj. musí také platit obrácený přechod ze soustavy ![]() k soustavě S. Soustava S se pohybuje vzhledem k soustavě
k soustavě S. Soustava S se pohybuje vzhledem k soustavě ![]() rychlostí
rychlostí ![]() . Proto je možné inverzní Lorentzovu transformaci možné psát ve tvaru:
. Proto je možné inverzní Lorentzovu transformaci možné psát ve tvaru:  ,
, ![]() ,
, ![]() a
a  .
.
Prostě jsme vyměnili odpovídající si „čárkované“ a „nečárkované“ souřadnice a změnili znaménko u velikosti rychlosti v. Tam, kde ve vztazích vystupuje druhá mocnina v se znaménko nemění, protože záporné číslo umocněné celé na druhou je číslo kladné.
V rámci zjednodušení jsme se zabývali pouze speciální Lorentzovou transformací, tj.vycházeli jsme ze speciálních počátečních podmínek (poloha souřadných systém obou inerciálních soustav, vektor rychlosti, …). Vztahy pro obecnou Lorentzovu transformaci jsou komplikovanější.