Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [8x] - Zobrazit | Nadstandardní komentář [3x] - Skrýt | Definice [0x] |
Bezmomentový setrvačník
Bezsilový setrvačník je špatný název pro bezmomentový rotačně symetrický setrvačník, který může sloužit např. jako model gyroskopu uloženého v tzv. Cardanově závěsu. Dalším velmi dobrým modelem tohoto typu setrvačníku je Země.
Tento setrvačník je charakterizován nulovým momentem sil (tj. ![]() ) a rotační symetrií, ze které pro momenty setrvačnosti vzhledem k hlavním osám vyplývá
) a rotační symetrií, ze které pro momenty setrvačnosti vzhledem k hlavním osám vyplývá ![]() . Takový setrvačník si lze představit podobně jako těleso na obr. 69.
. Takový setrvačník si lze představit podobně jako těleso na obr. 69.
Eulerovy dynamické rovnice (290) se tedy zjednoduší na tvar
| (291) |
Z poslední z Eulerových rovnic (291) dostáváme ![]() a tuto konstantu označíme
a tuto konstantu označíme ![]() , takže máme
, takže máme
| (292) |
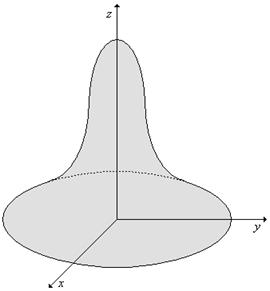 |
| Obr. 69 |
Z první z rovnic (291) můžeme vyjádřit ![]() a ze druhé
a ze druhé ![]() . Označíme-li
. Označíme-li
| (293) |
můžeme psát
| (294) |
Derivujeme-li nyní první z rovnic (294) podle času, dostaneme ![]() a po dosazení ze druhé dostaneme rovnici
a po dosazení ze druhé dostaneme rovnici ![]() neboli
neboli
| (295) |
což je rovnice popisující pohyb harmonického oscilátoru. Proto můžeme její řešení psát ve tvaru
| (296) |
kde A je amplituda kmitání harmonického pohybu a ![]() je počáteční fáze kmitání harmonického oscilátoru. Z hlediska řešení soustavy rovnic (291) to jsou integrační konstanty. Po úpravě první z rovnic (294) a následném dosazení řešení (296) získáme
je počáteční fáze kmitání harmonického oscilátoru. Z hlediska řešení soustavy rovnic (291) to jsou integrační konstanty. Po úpravě první z rovnic (294) a následném dosazení řešení (296) získáme ![]() . Dostáváme tedy
. Dostáváme tedy
| (297) |
S využitím částečných řešení (292), (296) a (297) dostáváme pro vektor úhlové rychlosti ![]() v závislosti na čase
v závislosti na čase
| (298) |
Vektor ![]() je tedy vyjádřen v bázi hlavních os a pro jeho velikost platí
je tedy vyjádřen v bázi hlavních os a pro jeho velikost platí ![]() . Po dosazení ze vztahu (298) tedy dostaneme
. Po dosazení ze vztahu (298) tedy dostaneme
| (299) |
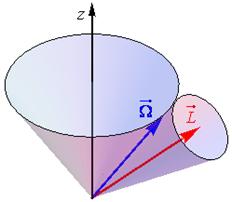
Uvědomíme-li si platnost vztahu (292) je zřejmé, že vektor úhlové rychlosti ![]() zapsaný ve tvaru (298) opisuje plášť rotačního kužele (viz obr. 70) s úhlovou frekvencí
zapsaný ve tvaru (298) opisuje plášť rotačního kužele (viz obr. 70) s úhlovou frekvencí ![]() . To znamená, že nutační úhel
. To znamená, že nutační úhel ![]() , který svírá vektor úhlové rychlosti
, který svírá vektor úhlové rychlosti ![]() s osou z, je konstantní a platí
s osou z, je konstantní a platí
| (300) |
Na obr. 70 je také znázorněna kružnice, ve které protíná rotující vektor ![]() dané tuhé těleso.
dané tuhé těleso.
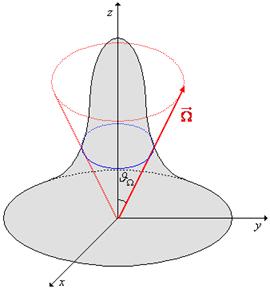 |
| Obr. 70 |
Skutečnost, že vektor ![]() opisuje plášť kužele, vyplývá z toho, že velikost tohoto vektoru je v čase konstantní, z-ová složka je konstantní a dále z toho, že x-ová a y-ová složka vektoru
opisuje plášť kužele, vyplývá z toho, že velikost tohoto vektoru je v čase konstantní, z-ová složka je konstantní a dále z toho, že x-ová a y-ová složka vektoru ![]() opisují kružnici; vztahy (296) a (297) jsou totiž parametrické rovnice kružnice vyjádřené v polárních souřadnicích.
opisují kružnici; vztahy (296) a (297) jsou totiž parametrické rovnice kružnice vyjádřené v polárních souřadnicích.
Ještě je nutné dopočítat Eulerovy úhly ![]() ,
, ![]() a
a ![]() pomocí Eulerových kinematických rovnic (257). Dosazením do těchto rovnic získáme pro náš vyšetřovaný případ soustavu rovnic
pomocí Eulerových kinematických rovnic (257). Dosazením do těchto rovnic získáme pro náš vyšetřovaný případ soustavu rovnic
| (301) |
Vzhledem k tomu, že koncový bod vektoru ![]() opisuje kružnici, je nutační úhel
opisuje kružnici, je nutační úhel ![]() konstantní, tedy
konstantní, tedy ![]() . Proto můžeme Eulerovy kinematické rovnice (301) psát v jednodušším tvaru:
. Proto můžeme Eulerovy kinematické rovnice (301) psát v jednodušším tvaru:
| (302) |
.Je-li totiž ![]() , pak je časová změna tohoto úhlu nulová, tj.
, pak je časová změna tohoto úhlu nulová, tj. ![]() .
.
Řešení soustavy rovnic (302) nalezneme postupnými kroky. Nejdříve umocníme první dvě rovnice soustavy na druhou a sečteme je. Dostaneme rovnici ![]() , po jejíž úpravě získáme tvar
, po jejíž úpravě získáme tvar ![]() . Odmocněním přejde rovnice na tvar
. Odmocněním přejde rovnice na tvar
| (303) |
odkud vyplývá
| (304) |
Ve vztahu (303) je na jeho pravé straně konstanta, proto je integrace podle proměnné t jednoduchá.
Vydělením prvních dvou rovnic soustavy (302) získáme rovnici ![]() , která po úpravě přejde na tvar
, která po úpravě přejde na tvar ![]() . Dostáváme tedy rovnici
. Dostáváme tedy rovnici
| (305) |
Derivací rovnice (305) podle času získáme rovnici ![]() , odkud můžeme vyjádřit
, odkud můžeme vyjádřit
| (306) |
Ze druhé rovnice soustavy (302) můžeme vyjádřit
| (307) |
Nyní můžeme do vztahu (306) dosadit ze vztahu (307), čímž získáme rovnici ![]() . Do jejího upraveného tvaru
. Do jejího upraveného tvaru ![]() dosadíme ze vztahu (303) a získáme
dosadíme ze vztahu (303) a získáme
| (308) |
Odtud již snadno určíme
| (309) |
Dosazením vztahů (303) a (308) do třetí rovnice soustavy (302) dostaneme ![]() . Postupnými úpravami získáme rovnici ve tvaru
. Postupnými úpravami získáme rovnici ve tvaru ![]() , a tedy můžeme psát
, a tedy můžeme psát ![]() . S využitím vztahu (293) dostáváme rovnici ve tvaru
. S využitím vztahu (293) dostáváme rovnici ve tvaru 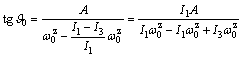 , takže máme
, takže máme
| (310) |
Získali jsme tedy řešení Eulerových kinematických rovnic ve tvaru
| (311) |
Při hledání řešení soustavy rovnic (302) byly prováděny operace, které z hlediska matematiky vyžadují komentáře a diskusi jejich platnosti (při dělení není možné dělit nulou, …). Z fyzikálního hlediska ovšem hodnoty goniometrických funkcí nemohou být nulové, tj. jejich argumenty nemohou z fyzikálních důvodů mít hodnoty 0 nebo ![]() . Proto jsou všechny provedené úpravy v tomto případě korektní.
. Proto jsou všechny provedené úpravy v tomto případě korektní.
U bezmomentového setrvačníku tedy nastává tzv. regulární precese (pravidelná precese), při níž se poloha osy otáčení (tj. směr vektoru ![]() ) mění v čase pravidelně (koncový bod vektoru opisuje kružnici). V případě rotace Země je tato precese důsledkem pohybů během počátečního vývoje Sluneční soustavy, dopadem meteoroidů na Zem, … Ve skutečnosti ovšem právě popisovaná precese není takto pravidelná, neboť na Zemi působí svou gravitační silou Měsíc, působí na ní i Slunce, sama Země není dokonale symetrické těleso ani to není ideálně tuhé těleso, … Proto vznikají nepřesnosti v tomto precesním pohybu, které mají periodu 427 dní, a zemská osa tedy neprotíná Zemi v jednom bodě (severní pól), ale opisuje kolem severního pólu kružnici o poloměru asi 4 m.
) mění v čase pravidelně (koncový bod vektoru opisuje kružnici). V případě rotace Země je tato precese důsledkem pohybů během počátečního vývoje Sluneční soustavy, dopadem meteoroidů na Zem, … Ve skutečnosti ovšem právě popisovaná precese není takto pravidelná, neboť na Zemi působí svou gravitační silou Měsíc, působí na ní i Slunce, sama Země není dokonale symetrické těleso ani to není ideálně tuhé těleso, … Proto vznikají nepřesnosti v tomto precesním pohybu, které mají periodu 427 dní, a zemská osa tedy neprotíná Zemi v jednom bodě (severní pól), ale opisuje kolem severního pólu kružnici o poloměru asi 4 m.
Tato kružnice je analogická kružnici, která je na obr. 70 znázorněna modrou křivkou.
Právě určený směr úhlové rychlosti ![]() (tj. směr osy rotace) byl určen vzhledem k tělesu (vzhledem k Zemi, vzhledem ke korotující bázi). Určit směr vektoru
(tj. směr osy rotace) byl určen vzhledem k tělesu (vzhledem k Zemi, vzhledem ke korotující bázi). Určit směr vektoru ![]() vzhledem k pevné bázi (vzhledem ke stálicím, vzhledem k systému GPS, …) není jednoduché. Pro určení pohybu vektoru
vzhledem k pevné bázi (vzhledem ke stálicím, vzhledem k systému GPS, …) není jednoduché. Pro určení pohybu vektoru ![]() vzhledem k pevné bázi je nutné určit jeden vybraný směr. Tímto vybraným směrem může být např. směr vektoru momentu hybnosti
vzhledem k pevné bázi je nutné určit jeden vybraný směr. Tímto vybraným směrem může být např. směr vektoru momentu hybnosti ![]() . Moment hybnosti je totiž veličina, která se v izolované soustavě zachovává.
. Moment hybnosti je totiž veličina, která se v izolované soustavě zachovává.
Bezmomentový setrvačník takovou izolovanou soustavou je. Ostatně ze vztahu (285) pro bezmomentový setrvačník plyne ![]() a tedy
a tedy ![]()
S využitím vztahů (288), (292), (296) a (297) můžeme pro složky momentu hybnosti ![]() psát:
psát:
| (312) |
a pro jeho velikost dostáváme ![]() . Po dosazení ze vztahů (312) pak máme
. Po dosazení ze vztahů (312) pak máme
| (313) |
Vektor momentu hybnosti ![]() tedy opisuje také plášť kužele, ale obecně jiný, než opisuje vektor úhlové rychlosti
tedy opisuje také plášť kužele, ale obecně jiný, než opisuje vektor úhlové rychlosti ![]() . Oba ale opisují kužely se stejnou úhlovou frekvencí
. Oba ale opisují kužely se stejnou úhlovou frekvencí ![]() . Vektor momentu hybnosti
. Vektor momentu hybnosti ![]() přitom svírá s osou z stálý úhel
přitom svírá s osou z stálý úhel ![]() , pro který platí
, pro který platí
| (314) |
Úhel ![]() má přitom stejnou hodnotu jako úhel
má přitom stejnou hodnotu jako úhel ![]() z řešení (311).
z řešení (311).
Na základě nalezeného řešení (298) pro vektor úhlové rychlosti ![]() a řešení (312) pro vektor momentu hybnosti
a řešení (312) pro vektor momentu hybnosti ![]() lze psát
lze psát
| (315) |
což znamená, že v každém okamžiku vektory ![]() a
a ![]() a osa z leží v jedné rovině.
a osa z leží v jedné rovině.
Na vztah (315) lze nahlížet jako na parametrické vyjádření roviny, která je dána vektory ![]() a
a ![]() .
.
Z hlediska pevné báze (tj. vzhledem ke stálicím, systému GPS, …) má stálý směr v prostoru vektor momentu hybnosti ![]() a setrvačník (Země) rotuje kolem něj.
a setrvačník (Země) rotuje kolem něj.
Kolem vektoru ![]() tedy rotuje osa z a kolem ní vektor úhlové rychlosti
tedy rotuje osa z a kolem ní vektor úhlové rychlosti ![]() .
.
Situaci lze znázornit pomocí dvou kuželů, které se kolem sebe valí. Přímka, která je okamžitou dotyčnicí obou kuželů, určuje směr vektoru úhlové rychlosti ![]() . Oba kužely přitom popisují precesi vektoru úhlové rychlosti
. Oba kužely přitom popisují precesi vektoru úhlové rychlosti ![]() - jeden kužel znázorňuje její precesi kolem vektoru momentu hybnosti
- jeden kužel znázorňuje její precesi kolem vektoru momentu hybnosti ![]() , druhý kužel pak precesi kolem osy z daného kartézského systému.
, druhý kužel pak precesi kolem osy z daného kartézského systému.
V závislosti na vzájemné hodnotě momentů setrvačnosti ![]() a
a ![]() uvažovaného tělesa mohou nastat dva případy:
uvažovaného tělesa mohou nastat dva případy:
1. ![]() - ze vztahu (314) a z toho, že funkce tangens je rostoucí, vyplývá, že
- ze vztahu (314) a z toho, že funkce tangens je rostoucí, vyplývá, že ![]() a kužel spojený s momentem hybnosti
a kužel spojený s momentem hybnosti ![]() se valí uvnitř kužele spojeného s osou z daného kartézského systému (viz obr. 71).
se valí uvnitř kužele spojeného s osou z daného kartézského systému (viz obr. 71).
2. ![]() - ze vztahu (314) a z toho, že funkce tangens je rostoucí, vyplývá, že
- ze vztahu (314) a z toho, že funkce tangens je rostoucí, vyplývá, že ![]() a kužel spojený s momentem hybnosti
a kužel spojený s momentem hybnosti ![]() se valí vně kužele spojeného s osou z daného kartézského systému (viz obr. 72).
se valí vně kužele spojeného s osou z daného kartézského systému (viz obr. 72).
Vektory na obr. 71 a obr. 72 by měly být správně otočeny tak, aby vektor momentu hybnosti ![]() měl svislý směr. Bylo by tím lépe naznačeno, že je to právě tento vektor, jehož směr se v prostoru zachovává!
měl svislý směr. Bylo by tím lépe naznačeno, že je to právě tento vektor, jehož směr se v prostoru zachovává!
Pro nesymetrický setrvačník je řešení jeho pohybu komplikovanější. Navíc se nezachovává ani směr ani velikost úhlové rychlosti ![]() .
.
U symetrického se zachovává velikost vektoru úhlové rychlosti ![]() .
.
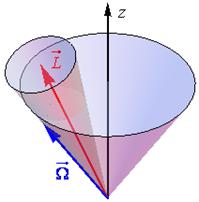 |  |
| Obr. 71 | Obr. 72 |