Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [2x] - Skrýt | Nadstandardní komentář [0x] | Definice [0x] |
***Galileiho transformace
Galileiho transformace se týká problému pohybu dvou inerciálních soustav. Uvažujme inerciální soustavu ![]() , která se pohybuje rychlostí o velikosti v vzhledem k inerciální soustavě S; v obou soustavách přitom zvolíme soustavy souřadnic 0xyz resp.
, která se pohybuje rychlostí o velikosti v vzhledem k inerciální soustavě S; v obou soustavách přitom zvolíme soustavy souřadnic 0xyz resp. ![]() .
.
Vezmeme v úvahu pouze tzv. speciální Galileiho transformaci, tj. transformaci mezi takovými dvěma inerciálními soustavami, u nichž v počátečním čase ![]() splývaly soustavy souřadnic 0xyz a
splývaly soustavy souřadnic 0xyz a ![]() . Inerciální soustava
. Inerciální soustava ![]() se začala v čase
se začala v čase ![]() pohybovat vůči soustavě S rychlostí o velikosti v v kladném směru osy x (resp.
pohybovat vůči soustavě S rychlostí o velikosti v v kladném směru osy x (resp. ![]() ). Určitou událost A popíšeme v soustavě
). Určitou událost A popíšeme v soustavě ![]() souřadnicemi
souřadnicemi ![]() , v soustavě S popíšeme tu samou událost souřadnicemi
, v soustavě S popíšeme tu samou událost souřadnicemi ![]() . Mezi uvedenými souřadnicemi platí převodní vztahy:
. Mezi uvedenými souřadnicemi platí převodní vztahy: ![]() ,
, ![]() ,
, ![]() a
a ![]() (viz obr. 1, kde je zobrazena událost A pouze v soustavě souřadnic v rovině).
(viz obr. 1, kde je zobrazena událost A pouze v soustavě souřadnic v rovině).
V řeči klasické mechaniky je bodová událost totéž co hmotný bod!
Bude-li se bod A pohybovat rychlostí o velikosti u vzhledem k soustavě S, lze jeho velikost rychlosti ![]() vzhledem k soustavě
vzhledem k soustavě ![]() vyjádřit z následující úvahy. Za časový okamžik
vyjádřit z následující úvahy. Za časový okamžik ![]() se změní poloha bodu A o
se změní poloha bodu A o ![]() . Vzhledem k tomu, že pro velikost x-ové složky rychlosti bodu A vzhledem k soustavě S platí
. Vzhledem k tomu, že pro velikost x-ové složky rychlosti bodu A vzhledem k soustavě S platí ![]() a pro velikost x-ové složky rychlosti bodu A vzhledem k soustavě S´ platí
a pro velikost x-ové složky rychlosti bodu A vzhledem k soustavě S´ platí ![]() , dostáváme z výrazu pro přírůstek polohy (po vydělení
, dostáváme z výrazu pro přírůstek polohy (po vydělení ![]() ):
): ![]() . Pro složky rychlostí ve směru os y a z (resp.
. Pro složky rychlostí ve směru os y a z (resp. ![]() a
a ![]() ) dostáváme:
) dostáváme: ![]() a
a ![]() .
.
Analogickou úvahou (tedy s využitím vztahu ![]() ) lze dostat vztah pro transformaci zrychlení bodu A:
) lze dostat vztah pro transformaci zrychlení bodu A: ![]() ,
, ![]() a
a ![]() .
.
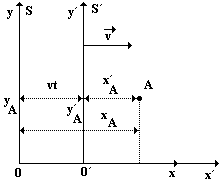 |
| Obr. 1 |
Inverzní Galileiho transformací je transformace, při níž přecházíme ze soustavy ![]() do soustavy S.
do soustavy S.
To znamená, že vyjadřujeme „nečárkované“ souřadnice, rychlosti a zrychlení (resp. jejich složky).
Obecná Galileiho transformace pak odpovídá situaci, kdy počátky soustav souřadnic inerciálních soustav S a ![]() jsou vůči sobě posunuty v libovolném směru o libovolnou vzdálenost, osy jsou vůči sobě natočeny o libovolný úhel a vektor rychlosti
jsou vůči sobě posunuty v libovolném směru o libovolnou vzdálenost, osy jsou vůči sobě natočeny o libovolný úhel a vektor rychlosti ![]() není rovnoběžný s žádnou z os soustav.
není rovnoběžný s žádnou z os soustav.