Encyklopedie fyziky |
| NASTAVENÍ TISKU (tato tabulka nebude vytištěna) | Zpět k článku | Vytiskni! | |
| Komentáře [3x] - Skrýt | Nadstandardní komentář [1x] - Skrýt | Definice [0x] |
Problém dvou těles
Uvažujme nyní pohyb dvou těles o srovnatelných hmotnostech ![]() a
a ![]() , jejichž polohy jsou popsány polohovými vektory
, jejichž polohy jsou popsány polohovými vektory ![]() a
a ![]() (viz obr. 47).
(viz obr. 47).
Takovými tělesy může být např. dvojice Země - Měsíc, Pluto - Cháron, dvojhvězda, …
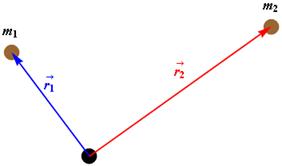 |
| Obr. 47 |
Systém má celkem 6 stupňů volnosti (na každé těleso připadají 3 stupně volnosti) a budeme uvažovat pouze vzájemné silové působení (nebudeme tedy započítávat např. vliv centra uvažovaného centrálního pole).
Tři stupně volnosti připadající na každé těleso odpovídají tomu, že každé z těles se může pohybovat ve třech navzájem nezávislých směrech.
Můžeme tedy napsat lagrangián této situace ve tvaru
 . . | (121) |
Tento tvar lagrangiánu ale není příliš vhodný pro další výpočty - zobecněné souřadnice ![]() a
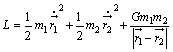
a ![]() nejsou zvoleny nejlépe. Lepší volba by byla zvolit relativní souřadnice
nejsou zvoleny nejlépe. Lepší volba by byla zvolit relativní souřadnice ![]() a
a ![]() , kde
, kde ![]() je poloha těžiště systému uvažovaných těles a
je poloha těžiště systému uvažovaných těles a ![]() je relativní poloha těles vůči sobě (viz obr. 48). Převodní vztahy tedy jsou
je relativní poloha těles vůči sobě (viz obr. 48). Převodní vztahy tedy jsou
| (122) |
 |
| Obr. 48 |
Na základě vztahů (122) (tj. řešením soustavy rovnic pro neznámé ![]() a
a ![]() ) získáme:
) získáme:
| (123) |
Dosazením rovnic (123) do lagrangiánu ve tvaru (121) dostaneme lagrangián ve tvaru
| (124) |
který nezávisí na zobecněné souřadnici R. To ovšem znamená, že
| (125) |
je integrál pohybu. Konkrétně vztah (125) je vyjádřením zákona zachování hybnosti. Jestliže se ovšem zachovává hybnost, nepůsobí na uvažovanou soustavu těles okolní tělesa silou a soustava sama se pohybuje rovnoměrným přímočarým pohybem. Proto se rovnoměrně přímočaře pohybuje i těžiště T soustavy uvažovaných těles. Bez újmy na obecnosti tedy můžeme vyšetřovat pohyb těles o hmotnostech ![]() a
a ![]() v těžišťové soustavě. To ovšem znamená, že
v těžišťové soustavě. To ovšem znamená, že ![]() .
.
V těžišťové soustavě se totiž těžiště nepohybuje.
Skutečnost, že si můžeme zvolit libovolnou vztažnou soustavu, v níž budeme pohyb vyšetřovat, vyplývá z relativnosti pohybu a Galileiho transformace mezi dvěma soustavami souřadnic.
Vyjádření (123) původních vektorů ![]() a
a ![]() v závislosti na nově zvolených zobecněných souřadnicích
v závislosti na nově zvolených zobecněných souřadnicích ![]() a
a ![]() se tedy zjednoduší:
se tedy zjednoduší:
| (126) |
Tím se podařila redukce původní úlohy na úlohu jednodušší, jejíž lagrangián bude mít tvar
| (127) |
kde
| (128) |
je tzv. redukovaná hmotnost. Tím jsme získali úlohu, která je analogická jako Keplerova úloha: jedná se o pohyb tělesa s hmotností ![]() v centrálním silovém poli tělesa o hmotnosti
v centrálním silovém poli tělesa o hmotnosti ![]() (viz obr. 49). Platí tedy i závěry vyplývající z řešení Keplerovy úlohy (tj. např. Keplerovy zákony), ale je nutné vše přeformulovat pomocí nových proměnných, pomocí nových hmotností
(viz obr. 49). Platí tedy i závěry vyplývající z řešení Keplerovy úlohy (tj. např. Keplerovy zákony), ale je nutné vše přeformulovat pomocí nových proměnných, pomocí nových hmotností ![]() a
a ![]() .
.
 |
| Obr. 49 |
Skutečnost, že máme dvě tělesa o hmotnostech ![]() a
a ![]() , vyplývá z lagrangiánu zapsaného ve tvaru (127), do jehož druhého členu můžeme též dosadit ze vztahu (128). Dostaneme tak
, vyplývá z lagrangiánu zapsaného ve tvaru (127), do jehož druhého členu můžeme též dosadit ze vztahu (128). Dostaneme tak
| (129) |