Zobecněné souřadnice
Zobecněné souřadnice jsou libovolné parametry, které jednoznačně popisují všechny možné konfigurace daného systému.
Všechny možné konfigurace, které zobecněné souřadnice popisují, jsou tvary trajektorií, polohy hmotných bodů, …
Slovo konfigurace je použito záměrně - zobecněné souřadnice totiž nepopisují stav! Abychom získali popis stavu hmotného bodu, je nutné ještě „něco přidat“ (musíme přidat prostor rychlostí).
Zobecněnými souřadnicemi mohou být kartézské souřadnice, polární souřadnice, úhly, … Volíme je tak, aby jednoznačně popisovaly konfiguraci daného systému a přitom tento popis byl co možná nejvýhodnější pro další výpočty.
 |  |
| Obr. 18 | Obr. 19 |
Použití zobecněných souřadnic bude ukázáno na několika příkladech:
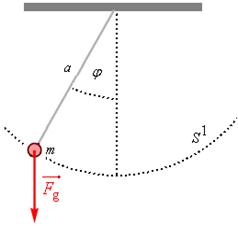
1. kyvadlo (viz obr. 18) - zobecněnou souřadnicí je úhel ![]() , který popisuje výchylku hmotného bodu z rovnovážné polohy, tj.
, který popisuje výchylku hmotného bodu z rovnovážné polohy, tj. ![]() . Konfiguračním prostorem je kružnice
. Konfiguračním prostorem je kružnice ![]() .
.
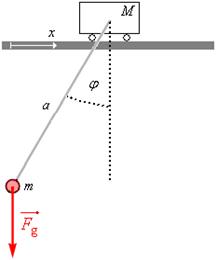
2. eliptické kyvadlo (viz obr. 19) - je realizováno tělesem o hmotnosti M, které se může bez tření pohybovat po úsečce po vodorovné podložce a k němuž je zavěšeno na vlákně zanedbatelné hmotnosti těleso o hmotnosti m. Těleso o hmotnosti m se pohybuje vždy proti pohybu tělesa o hmotnosti M, což vyplývá ze zákona zachování hybnosti (těžiště soustavy zůstává na místě). Proto se těleso o hmotnosti m pohybuje po elipse. Vhodnými zobecněnými souřadnicemi jsou poloha tělesa o hmotnosti M a výchylka tělesa o hmotnosti m z rovnovážné polohy - tedy ![]() a
a ![]() . Konfiguračním prostorem je válcová plocha - tj. prostor
. Konfiguračním prostorem je válcová plocha - tj. prostor ![]() .
.
Souřadnice x může nabývat hodnot z určitého intervalu reálných čísel - těleso o hmotnosti M se pohybuje po úsečce. Souřadnice ![]() omezuje pohyb tělesa o hmotnosti m na kružnici.
omezuje pohyb tělesa o hmotnosti m na kružnici.
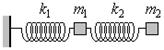
3. dvě spojené pružiny (viz obr. 20) - pružiny kmitají jen v jednom směru (na podložce, na které leží). Pro popis systému se nabízí několik souřadnic: vzdálenosti těles upevněných na pružinách od místa upevnění první pružiny k nehybné stěně, délky pružin, … Nejvhodnější na popis jsou ale výchylky pružin od rovnovážné polohy. Proto ![]() a
a ![]() .
.
![]() a
a ![]() jsou konkrétní čísla, nikoliv označení souřadnic - proto mají index dole.
jsou konkrétní čísla, nikoliv označení souřadnic - proto mají index dole.
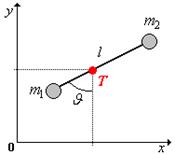
4. činka (viz obr. 21) - při popisu se omezíme jen na pohyb v rovině. Optimální popis lze udělat pomocí souřadnice polohy těžiště (popisuje translační pohyb těžiště) a úhlu natočení činky (popisuje rotační pohyb). Proto ![]() ,
, ![]() a
a ![]() .
.
Po zobecnění na pohyb v prostoru a nahrazení tyčky pružinkou získáme velmi dobré přiblížení pro popis dvouatomových molekul. Kromě translačního pohybu a rotačního pohybu mohou atomy tvořící molekuly ještě i vibrovat.
 |  |
| Obr. 20 | Obr. 21 |