Hamiltonův variační princip
Pro další výklad je nezbytné pochopit pojmy variace funkce ![]() a variace funkcionálu
a variace funkcionálu ![]() . Tyto pojmy vysvětlíme na příkladu, v němž budeme uvažovat pohyb jedné částice po přímce. Závislost zobecněné souřadnice q na čase t je zobrazena na obr. 52. Je to jedna z mnoha závislostí, které mohou popisovat daný pohyb. Funkce
. Tyto pojmy vysvětlíme na příkladu, v němž budeme uvažovat pohyb jedné částice po přímce. Závislost zobecněné souřadnice q na čase t je zobrazena na obr. 52. Je to jedna z mnoha závislostí, které mohou popisovat daný pohyb. Funkce ![]() je hladká funkce, která vstupuje jako parametr lagrangiánu do vztahu pro akci S (vztah (131)). Hodnota funkce
je hladká funkce, která vstupuje jako parametr lagrangiánu do vztahu pro akci S (vztah (131)). Hodnota funkce ![]() v časech
v časech ![]() a
a ![]() (tj. poloha bodů A a B) je daná - jsou to počáteční podmínky řešené úlohy.
(tj. poloha bodů A a B) je daná - jsou to počáteční podmínky řešené úlohy.
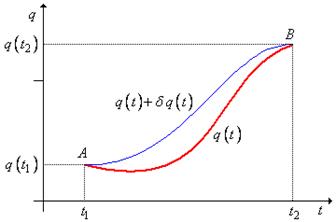 |
| Obr. 52 |
Nyní sestrojíme funkci ![]() tak, že v každém časovém okamžiku v intervalu
tak, že v každém časovém okamžiku v intervalu ![]() přičteme k funkční hodnotě funkce
přičteme k funkční hodnotě funkce ![]() hodnotu
hodnotu ![]() . Vzhledem k tomu, že hodnoty funkce
. Vzhledem k tomu, že hodnoty funkce ![]() v časech
v časech ![]() a
a ![]() jsou dány, platí
jsou dány, platí
| (132) |
Vytvoříme tedy trajektorii, která se od té původní „o trošku“ liší, a budeme hledat tu správnou (v přírodě realizovanou) trajektorii, která má minimální, maximální nebo „skoro stejnou“ akci.
Výše popsaným způsobem jsme provedli tzv. izochronní variaci.
Izochronní variace je taková variace, při níž k funkční hodnotě funkce ![]() v bodě
v bodě ![]() (tj. k
(tj. k ![]() ) přičteme hodnotu
) přičteme hodnotu ![]() a získáme funkční hodnotu funkce
a získáme funkční hodnotu funkce ![]() v čase
v čase ![]() .
.
To znamená, že křivku ![]() „přišpendlíme“ v bodech A a B (dle obr. 52) a tuto křivku „deformujeme“ jen tak, že jí natahujeme ve směru osy q. Nenatahujeme jí ve směru osy t - takové deformování by už nebyly izochronní variace.
„přišpendlíme“ v bodech A a B (dle obr. 52) a tuto křivku „deformujeme“ jen tak, že jí natahujeme ve směru osy q. Nenatahujeme jí ve směru osy t - takové deformování by už nebyly izochronní variace.
Funkci ![]() přiřadíme akci
přiřadíme akci ![]() a funkci
a funkci ![]() akci
akci ![]() a můžeme definovat variaci akce, která přísluší funkci
a můžeme definovat variaci akce, která přísluší funkci ![]() a variaci funkce
a variaci funkce ![]() :
:
| (133) |
Protože hledáme funkci ![]() tak, aby
tak, aby ![]() pro každé
pro každé ![]() , musíme pro funkce blízké funkci
, musíme pro funkce blízké funkci ![]() získat podobné hodnoty akce S. To znamená, že
získat podobné hodnoty akce S. To znamená, že ![]() nebude tak velké, jak je ilustrováno na obr. 52. Většinou lze psát
nebude tak velké, jak je ilustrováno na obr. 52. Většinou lze psát
| (134) |
kde ![]() . Potom ovšem
. Potom ovšem ![]() je lineární diferenciál (tzv. Frechetův diferenciál).
je lineární diferenciál (tzv. Frechetův diferenciál).
![]() je tedy infinitezimálně malé.
je tedy infinitezimálně malé.
Popisuje-li funkce ![]() trajektorii pohybu dané soustavy a mění-li se akce S při přechodu od funkce
trajektorii pohybu dané soustavy a mění-li se akce S při přechodu od funkce ![]() k funkci
k funkci ![]() , pak
, pak ![]() popisuje trajektorii, která je sice možná, ale není to skutečná trajektorie, po níž se daný systém skutečně pohybuje.
popisuje trajektorii, která je sice možná, ale není to skutečná trajektorie, po níž se daný systém skutečně pohybuje.
Příroda prostě takové trajektorie, u kterých se při jejich malé změně mění S, nemá ráda.
Nutná podmínka pro splnění vztahu (130) je skutečnost, že funkce ![]() musí řešit Eulerovy - Lagrangeovy rovnice. Tyto rovnice jsou obecné diferenciální rovnice druhého řádu. Speciální volbou funkce přecházejí na Lagrangeovy rovnice druhého druhu (47). Proto nyní dokážeme, že z podmínky (130) plyne existence Lagrangeových rovnic druhého druhu.
musí řešit Eulerovy - Lagrangeovy rovnice. Tyto rovnice jsou obecné diferenciální rovnice druhého řádu. Speciální volbou funkce přecházejí na Lagrangeovy rovnice druhého druhu (47). Proto nyní dokážeme, že z podmínky (130) plyne existence Lagrangeových rovnic druhého druhu.
Vyjdeme ze vztahu (133), do kterého dosadíme z definičního vztahu akce S (131). Důkaz provedeme rovnou pro j zobecněných souřadnic (![]() , kde n je počet stupňů volnosti). Dostaneme tak
, kde n je počet stupňů volnosti). Dostaneme tak  . Důležité je, že symbolem
. Důležité je, že symbolem ![]() (resp.
(resp. ![]() ) rozumíme časovou derivaci zobecněné souřadnice (resp. variace funkce), tj.
) rozumíme časovou derivaci zobecněné souřadnice (resp. variace funkce), tj. ![]() (resp.
(resp. ![]() ).
).
Nyní provedeme Taylorův rozvoj lagrangiánu, který je závislý na variaci funkce ![]() . Z důvodu vyšší přehlednosti již nebudeme vypisovat argumenty lagrangiánu L. Získáme tedy
. Z důvodu vyšší přehlednosti již nebudeme vypisovat argumenty lagrangiánu L. Získáme tedy  , kde
, kde ![]() je chyba, která vzniká při zanedbání členů obsahujících vyšší mocninu variace funkce
je chyba, která vzniká při zanedbání členů obsahujících vyšší mocninu variace funkce ![]() . Vzhledem k tomu, že variace funkce je definovaná vztahem (134), je chyba vzniká použitím Taylorova rozvoje malá. Dostáváme tedy
. Vzhledem k tomu, že variace funkce je definovaná vztahem (134), je chyba vzniká použitím Taylorova rozvoje malá. Dostáváme tedy
 . . | (135) |
Vzhledem k tomu, že jsme provedli pouze izochronní variace, není v právě provedeném Taylorově rozvoji výraz ![]() , neboť
, neboť ![]() .
.
Je dobré si uvědomit, že derivace podle času popisují změny v čase (tj. podél osy t na obr. 52), zatímco variace ![]() popisují změny funkce
popisují změny funkce ![]() (tj. změny podél osy q).
(tj. změny podél osy q).
Z izochronní variace funkce ![]() také vyplývá platnost identity
také vyplývá platnost identity
| (136) |
Vztah (136) říká, že časové a prostorové variace jsou při izochronní variaci na sobě nezávislé (změny provedené v času a změny provedené v prostorové souřadnici jsou tedy libovolné).
Dosadíme-li identitu (136) do vztahu (135) dostaneme výraz
 , , | (137) |
ve kterém je člen ![]() . Ten můžeme upravit, pokud rozepíšeme časovou derivaci součinu
. Ten můžeme upravit, pokud rozepíšeme časovou derivaci součinu ![]() . Platí
. Platí ![]() , odkud
, odkud
| (138) |
Nyní dosadíme vyjádření (138) do vztahu (137) a integrál součtu dále rozepíšeme na součet dvou integrálů. Dostaneme tak
 . . | (139) |
První člen výrazu (139) lze psát ve tvaru  . Vzhledem k platnosti podmínky (132) je tento člen nulový. Proto můžeme výraz (139) přepsat ve tvaru
. Vzhledem k platnosti podmínky (132) je tento člen nulový. Proto můžeme výraz (139) přepsat ve tvaru
 | (140) |
Výraz (140) má být nulový, protože požadujeme splnění podmínky (130). Ta má ale platit pro všechny variace funkce ![]() (pro
(pro ![]() ), což znamená, že musí platit
), což znamená, že musí platit
| (141) |
což je zápis Lagrangeových rovnic druhého druhu.
Dokázali jsme tedy, že z podmínky (130) vyplývají Lagrangeovy rovnice druhého druhu (viz vztah (141)). Můžeme tedy říci, že platnost rovnic (141) je nutnou podmínkou pro to, aby platil vztah (130). Vzhledem k tomu, že Lagrangeovy rovnice druhého druhu jsou ekvivalentním popisem mechaniky jako Newtonovy rovnice (Newtonovy rovnice jsou speciálním případem Lagrangeových rovnic), lze i Newtonovy rovnice odvodit z Hamiltonova formalismu a z podmínky (130).
Hamiltonův formalismus vzbudil v době jeho zavedení i později řadu i teologických sporů. Zdálo se zvláštní, že někdo zná počáteční bod pohybu i koncový bod pohybu a na základě toho vybírá trajektorii, po níž se hmotný bod pohybuje. Ve skutečnosti se jedná ovšem jen o další efektivní popis reality (mechaniky, elektřiny a magnetismu, částí obecné teorie relativity, …).
Skutečnost, že je dán počáteční a koncový bod pohybu, vyplývá z podmínky (132) na variaci funkce ![]() .
.
Právě popsaný princip lze zobecnit i např. na pohyb tekutiny, na děje v elektromagnetickém poli a do dalších oborů fyziky. Obecně lze tento princip zobecnit i na nekonečný počet stupňů volnosti - tj. na spojité kontinuum. Hamiltonův princip lze tedy zobecnit i pro teorie pole.
Základní idea zobecnění variačního principu na nekonečně mnoho stupňů volnosti spočívá v přechodu od diskrétního rozložení zobecněných souřadnic ![]() , kde
, kde ![]() , ke spojitému rozložení
, ke spojitému rozložení ![]() , kde
, kde ![]() . Zobecněné souřadnice ve spojitém prostředí zapisujeme většinou ve tvaru
. Zobecněné souřadnice ve spojitém prostředí zapisujeme většinou ve tvaru ![]() , který lze chápat jako spojitou limitu
, který lze chápat jako spojitou limitu ![]() , a který lze považovat za zápis funkce dvou proměnných t a x. Analogicky můžeme pokračovat se souřadnicemi y a z a získat tak popis fyzikálního pole pomocí veličiny
, a který lze považovat za zápis funkce dvou proměnných t a x. Analogicky můžeme pokračovat se souřadnicemi y a z a získat tak popis fyzikálního pole pomocí veličiny ![]() . V závislosti na tvaru zápisu této fyzikální veličiny lze odlišit různé typy polí:
. V závislosti na tvaru zápisu této fyzikální veličiny lze odlišit různé typy polí:
1. ![]() - popisuje skalární pole;
- popisuje skalární pole;
2. ![]() - popisuje vektorové pole v rámci elektromagnetického pole;
- popisuje vektorové pole v rámci elektromagnetického pole;
3. ![]() - popisuje tenzorové pole v rámci obecné teorie relativity.
- popisuje tenzorové pole v rámci obecné teorie relativity.
Pro každý z těchto případů platí podmínka (130).
V roce 1890 našel německý matematik a fyzik Hermann Ludwig Ferdinand von Helmholtz (1821 - 1894) akci S, pro kterou z podmínky (130), vycházejí Maxwellovy rovnice popisující elektromagnetické pole.
Existují i speciální akce, na základě kterých dostaneme popis geodetik v rámci obecné teorie relativity.