Rotace s pevnou osou
Rotace s pevnou osou je speciálním případem obecného otáčení, a proto je toto otáčení popsáno i speciálními maticemi A a ![]() definované vztahy (226) a (235).
definované vztahy (226) a (235).
Speciálnost matic spočívá v tom, že mají jednoduchý tvar - viz definice matice A pomocí vztahu (242). Matice obsahuje řadu konstantních prvků (nuly a jedničky) právě proto, že popisuje speciálně zvolenou rotaci tuhého tělesa.
Budeme-li uvažovat rotaci kolem osy z, tj. kolem přímky se směrovým vektorem ![]() , bude mít matice A tvar
, bude mít matice A tvar
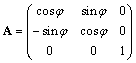 , , | (242) |
neboť otáčení lze popsat funkcí ![]() .
.
S využitím vztahu (236) můžeme matici ![]() psát ve tvaru
psát ve tvaru  , odkud na základě vztahu (238) vyplývá
, odkud na základě vztahu (238) vyplývá
| (243) |
Tento tvar vektoru úhlové rychlosti je z fyzikálního hlediska v pořádku: vektor ![]() má velikost i směr, které odpovídají skutečnosti. Velikost vektoru
má velikost i směr, které odpovídají skutečnosti. Velikost vektoru ![]() je
je ![]() a jeho směr je totožný s osou z (tj. s tou osou, kolem které se tuhé těleso otáčí).
a jeho směr je totožný s osou z (tj. s tou osou, kolem které se tuhé těleso otáčí).