Tuhé těleso a popis jeho pohybu
Úkolem kinematiky tuhého tělesa je najít vhodný popis otáčení tuhého tělesa. Proto začneme tím, že vymezíme pojem tuhého tělesa.
Tuhé těleso si lze představit jako krystal složený z nekonečně mnoha hmotných bodů, mezi nimiž existují skleronomní holonomní vazby.
Fakt, že silové působení mezi hmotnými body v tuhém tělese je popsáno skleronmními holonomními vazbami, znamená, že se tuhé těleso nedeformuje a nevyvíjí v čase.
Možnost deformace a vývoje v čase připouštíme až v kontinuu.
Tuhé těleso má:
1. tři stupně volnosti popisující translační pohyb - pro jednoduchost se uvažuje translační pohyb hmotného středu tuhého tělesa;
Tuhé těleso se může pohybovat nahoru - dolů, doleva - doprava a dopředu - dozadu, tedy ve třech nezávislých směrech.
2. tři stupně volnosti popisující rotační pohyb - uvažuje se rotace kolem okamžité osy otáčení procházející hmotným středem tuhého tělesa.
Tuhé tělese se může natáčet kolem tří os - představme si např. činku na posilování nebo obecně nějaké nesymetrické tuhé těleso (automobil padající po nehodě ze skály, …).
Uvažované tři stupně volnosti popisující rotační pohyb, jsou charakterizovány tzv. Eulerovými úhly.
 |
| Obr. 58 |
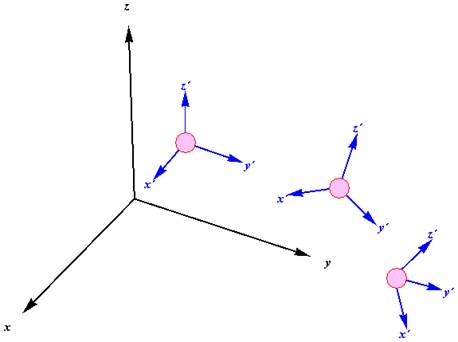
Pro popis pohybu tuhého tělesa se zavádějí dvě ortonormální báze:
1. pevná báze ![]() (pro
(pro ![]() ) - je to báze, jejíž poloha v prostoru je pevně daná vůči zvolenému inerciálnímu systému. V případě popisu pohybů skutečných těles (dopravní prostředky, …) je možné jejich polohu vzhledem k této bázi určit např. pomocí přístroje GPS.
) - je to báze, jejíž poloha v prostoru je pevně daná vůči zvolenému inerciálnímu systému. V případě popisu pohybů skutečných těles (dopravní prostředky, …) je možné jejich polohu vzhledem k této bázi určit např. pomocí přístroje GPS.
Poloha pevné báze se tedy s časem nemění.
Pohyb tuhého tělesa popisujeme vůči inerciální soustavě proto, že v této soustavě mají pohybové rovnice jednoduché matematické vyjádření - např. není nutné do nich zahrnovat setrvačné síly.
2. korotující báze ![]() (pro
(pro ![]() ) - tato báze je spojená s tuhým tělesem, její vektory mají společný počátek ve hmotném středu tělesa a tato báze se tedy pohybuje společně s daným tuhým tělesem. Její poloha v prostoru (např. vzhledem ke družicím systému GPS) se tedy mění v závislosti na pohybu tělesa. Natočení této korotující báze popisujeme vzhledem k pevné bázi (referenční bázi).
) - tato báze je spojená s tuhým tělesem, její vektory mají společný počátek ve hmotném středu tělesa a tato báze se tedy pohybuje společně s daným tuhým tělesem. Její poloha v prostoru (např. vzhledem ke družicím systému GPS) se tedy mění v závislosti na pohybu tělesa. Natočení této korotující báze popisujeme vzhledem k pevné bázi (referenční bázi).
Poloha této korotující báze se v čase mění. Tuto bázi si lze modelovat tak, že vezmeme bramboru (jako model tuhého tělesa) a do ní zapíchneme tři na sebe navzájem kolmé stejně dlouhé špejle představující tři navzájem kolmé jednotkové vektory báze. Hodíme-li bramboru, budou se špejle pohybovat spolu s bramborou. Polohu brambory (resp. tří špejlí) lze ale popisovat také vůči místnosti (pevná báze), v níž pokus provádíme a jejíž souřadnice jsme získali pomocí systému GPS.
Popisované báze jsou schématicky zobrazeny na obr. 58.
Poloha tuhého tělesa tedy bude jednoznačně určena, bude-li určeno natočení báze, která rotuje s tělesem (korotující báze), vůči pevné bázi v prostoru.
Pro kompletní popis pohybu tuhého tělesa je nutné najít transformační vztahy mezi oběma výše uvedenými bázemi. Báze ![]() a
a ![]() jsou spolu svázány ortogonální maticí přechodu A vztahem
jsou spolu svázány ortogonální maticí přechodu A vztahem
| (226) |
pro ![]() , kde
, kde ![]() jsou prvky transformační matice A splňující relace ortogonality ve tvaru
jsou prvky transformační matice A splňující relace ortogonality ve tvaru
| (227) |
pro ![]() .
.
Matice A tedy zachová při transformaci bází jejich ortogonalitu.
V dalším textu budeme využívat Einsteinovo sumační pravidlo, čímž se zápis vztahů zjednoduší. Všechny indexy budou nabývat hodnot 1, 2 a 3, neboť popisujeme trojrozměrné tuhé těleso pohybující se v trojrozměrném prostoru.
Indexy studovaných veličin a matematických objektů budeme v kapitole tuhé těleso psát kvůli větší přehlednosti dolů, což je přípustné, neboť pracujeme v ortogonálních systémech.
Vztahy (227) lze interpretovat též tak, že popisují skalární součin dvou řádků (resp. skalární součin dvou sloupců) matice A.
Vztahy (227) jsou definičními vztahy ortogonality. To znamená, že zaručují, že matice A převede pomocí vztahu (226) ortogonální bázi ![]() na ortogonální bázi
na ortogonální bázi ![]() .
.
Důkaz vztahů (227) lze provést pomocí jednoduché geometrické vlastnosti a s využitím vztahu (226). Pro dva ortogonální vektory ![]() a
a ![]() báze
báze ![]() platí
platí ![]() . S využitím vztahu (226) lze tedy psát
. S využitím vztahu (226) lze tedy psát ![]() , čím je dokázán první vztah. Při úpravách jsme využili i vlastnosti vektorů
, čím je dokázán první vztah. Při úpravách jsme využili i vlastnosti vektorů ![]() a
a ![]() báze
báze ![]() , pro které platí
, pro které platí ![]() . Druhou část vztahu (227) dokážeme s využitím vlastností transponovaných matic. Platí
. Druhou část vztahu (227) dokážeme s využitím vlastností transponovaných matic. Platí ![]() . A tím je dokázána druhá část vztahu (227).
. A tím je dokázána druhá část vztahu (227).
Pro ortogonální matici A dále platí
| (228) |
kde ![]() je inverzní matice k matici A. Vztah (228) přitom vyplývá ze vztahu (226) a z ortogonality vektorů bází
je inverzní matice k matici A. Vztah (228) přitom vyplývá ze vztahu (226) a z ortogonality vektorů bází ![]() a
a ![]() .
.
Matice A má devět složek, které jsou popsány devíti relacemi ortogonality. Nezávislých jich je přitom jen tolik, kolik je nezávislých složek symetrické matice - a těch je šest. Symetričnost matice A přitom vyplývá z výše uvedených vlastností ortogonality.
Symetrická matice typu (3, 3) má tři nezávislé prvky na hlavní diagonále a tři nezávislé prvky nad hlavní diagonálou. Prvky pod hlavní diagonálou už musejí být stejné jako prvky nad hlavní diagonálou, aby matice byla symetrická.
Každá ortogonální matice (tedy i matice A) má jen tři nezávislé prvky, které odpovídají třem stupňům volnosti pro rotační pohyb tuhého tělesa. (Všech devět prvků matice A je totiž svázáno šesti relacemi ortogonality - proto má matice A tři nezávislé prvky.) Budeme tedy hledat tři nezávislé parametry popisující rotaci tuhého tělesa. Ukáže se, že těmito nezávislými parametry jsou Eulerovy úhly.
Je nutné si uvědomit, že natočení tuhého tělesa se mění v čase: během rotace tuhého tělesa se mění natočení vektorů korotující báze ![]() spojené s tělesem vzhledem k pevné bázi
spojené s tělesem vzhledem k pevné bázi ![]() . Ta je ovšem pevně zvolená v prostoru, a proto je na čase nezávislá. To ale znamená, že na čase budou závislé prvky matice A. Časové změny fyzikálních veličin ale budeme vyšetřovat vůči oběma uvažovaným bázím. Budeme proto uvažovat dvě různé (ovšem navzájem ekvivalentní) fyzikální veličiny, které budou popisovat pohyb tuhého tělesa z hlediska uvažovaných dvou bází. Proto je důležité vždy vědět, vůči jakému systému popisujeme pohyb daného tuhého tělesa.
. Ta je ovšem pevně zvolená v prostoru, a proto je na čase nezávislá. To ale znamená, že na čase budou závislé prvky matice A. Časové změny fyzikálních veličin ale budeme vyšetřovat vůči oběma uvažovaným bázím. Budeme proto uvažovat dvě různé (ovšem navzájem ekvivalentní) fyzikální veličiny, které budou popisovat pohyb tuhého tělesa z hlediska uvažovaných dvou bází. Proto je důležité vždy vědět, vůči jakému systému popisujeme pohyb daného tuhého tělesa.
To znamená, že např. pohyb technika, který kráčí po rotujícím dětském kolotoči, můžeme popsat z hlediska vnějšího pozorovatele, který je mimo kolotoč, nebo z hlediska dítěte, které na dětském kolotoči sedí. Oba pozorovatelé (jak ten vnější, tak dítě na kolotoči) mohou vyšetřovat např. rychlost, kterou se technik pohybuje - oba přitom zjistí různé časové závislosti a různé velikosti rychlosti kráčejícího technika. A přitom fyzikální veličiny popisující pohyb technika, které definuje vnější pozorovat i dítě na kolotoči, jsou definované korektně (viz obr. 59).
 |
| Obr. 59 |