Zobecněné rychlosti
Konfigurační prostor (konfigurační varieta) Q popsaný zobecněnými souřadnicemi (17) není prostorem fyzikálních stavů daného systému.
Konfigurační prostor nepopisuje stavy systému, protože není možné počítat rychlosti, hybnosti, zrychlení, … hmotných bodů. Proto je nutné něco doplnit.
Aby konfigurační prostor popisoval stavy systému, je nutné doplnit tzv. zobecněné rychlosti
| (19) |
pro ![]() .
.
Jedná se o dodatečné (rychlostní) parametry, které jsou zcela nezávislé na poloze popsané zobecněnými souřadnicemi (17). Značení ![]() neznamená časovou derivaci zobecněné souřadnice - jedná se o historické označení zobecněných rychlostí, které se zobecněnými souřadnicemi nemají žádnou souvislost. Zobecněné souřadnice
neznamená časovou derivaci zobecněné souřadnice - jedná se o historické označení zobecněných rychlostí, které se zobecněnými souřadnicemi nemají žádnou souvislost. Zobecněné souřadnice ![]() a zobecněné rychlosti
a zobecněné rychlosti ![]() jsou tedy navzájem nezávislé. Libovolný bod tedy může mít libovolnou rychlost. Je proto důležité odlišovat označení zobecněných rychlostí od časové derivace zobecněné souřadnice.
jsou tedy navzájem nezávislé. Libovolný bod tedy může mít libovolnou rychlost. Je proto důležité odlišovat označení zobecněných rychlostí od časové derivace zobecněné souřadnice.
Formálně je nutné odlišit následující zápisy:
1. ![]() , kde
, kde ![]() je tzv. Kroneckerovo delta;
je tzv. Kroneckerovo delta;
2. ![]() ;
;
3. ![]()
4. ![]()
Pro libovolný bod P v konfiguračním prostoru jsou dány zobecněné souřadnice (17), které jednoznačně popisují jeho polohu. Prostor rychlostí v daném bodě je tečná rovina (tečný prostor) ![]() sestrojený v tomto bodě ke konfiguračnímu prostoru Q. Pro popis systému jsou tedy nutné dva prostory (viz obr. 23):
sestrojený v tomto bodě ke konfiguračnímu prostoru Q. Pro popis systému jsou tedy nutné dva prostory (viz obr. 23):
1. prostor poloh - je popsán zobecněnými souřadnicemi (17) a popisuje polohu hmotného bodu P v konfiguračním prostoru Q;
2. prostor rychlostí - popisuje rychlost hmotného bodu v daném bodě P. Vektor rychlosti ![]() leží v tečném prostoru
leží v tečném prostoru ![]() a složky tohoto vektoru v určité zvolené bázi jsou zobecněné rychlosti (19).
a složky tohoto vektoru v určité zvolené bázi jsou zobecněné rychlosti (19).
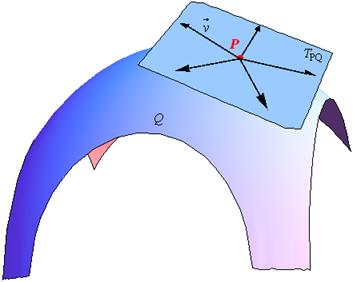 |
| Obr. 23 |
Lze tedy zavést prostor dimenze 2n, v němž jsou definovány jak zobecněné souřadnice (17), tak zobecněné rychlosti (19). Tento prostor už popisuje všechny možné stavy hmotných bodů, neboť kromě konfigurací popsaných zobecněnými souřadnicemi, obsahuje i prostor rychlostí. Tomuto prostoru se říká fázový prostor.
Jiné označení tohoto prostoru je také tečný bandl.
V prostoru ![]() jsou tedy definovány všechny možné rychlosti daného hmotného bodu (resp. soustavy hmotných bodů) ve všech bodech Q.
jsou tedy definovány všechny možné rychlosti daného hmotného bodu (resp. soustavy hmotných bodů) ve všech bodech Q.
 | |
| Obr. 24 | Obr. 25 |
Příklad: Fázový portrét harmonického oscilátoru
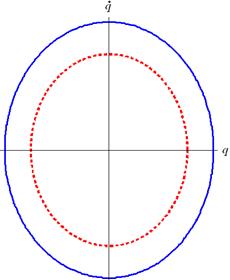
Zakreslete vývoj harmonického oscilátoru v tzv. fázovém prostoru, tj. sestrojte graf v diagramu, na jehož vodorovnou osu se nanáší zobecněná souřadnice a na svislou zobecněná rychlost.
Řešení: Harmonický oscilátor může být realizován např. pružinou, na které je zavěšen hmotný bod o hmotnosti m (viz obr. 24). Zobecněná souřadnice popisuje výchylku oscilátoru v závislosti na čase: ![]() . Rychlost oscilátoru je dána vztahem
. Rychlost oscilátoru je dána vztahem ![]() . Nyní sestrojíme požadovaný graf - v diagramu na obr. 25 jsou znázorněny dva grafy, které se liší amplitudou výchylky harmonického oscilátoru. Libovolný bod, který leží na vybrané křivce má souřadnice
. Nyní sestrojíme požadovaný graf - v diagramu na obr. 25 jsou znázorněny dva grafy, které se liší amplitudou výchylky harmonického oscilátoru. Libovolný bod, který leží na vybrané křivce má souřadnice ![]() , tj. poloha hmotného bodu zavěšeného na pružině v libovolném čase je dána skutečně souřadnicí polohy a rychlosti. Svislá osa fázového prostoru je pojmenována
, tj. poloha hmotného bodu zavěšeného na pružině v libovolném čase je dána skutečně souřadnicí polohy a rychlosti. Svislá osa fázového prostoru je pojmenována ![]() a je to zobecněná rychlost.
a je to zobecněná rychlost.
Oscilátor, který je v klidu, je ve fázovém prostoru popsán bodem ![]() , v němž se nachází v každém časovém okamžiku.
, v němž se nachází v každém časovém okamžiku.
Každým bodem fázového prostoru prochází právě jedna křivka, pomocí níž lze rekonstruovat trajektorii hmotného bodu. Každý bod fázového prostoru totiž určuje polohu a rychlost daného hmotného bodu (resp. systému hmotných bodů) v konkrétním čase. Analýzou všech bodů lze sestrojit trajektorii, po níž se hmotný bod pohyboval (resp. po níž se bude pohybovat, zůstane-li jeho rychlost stálá). Souřadnice ![]() každého bodu fázového prostoru tedy tvoří výchozí parametry pro řešení příslušných diferenciálních rovnic.
každého bodu fázového prostoru tedy tvoří výchozí parametry pro řešení příslušných diferenciálních rovnic.
Trajektorie hmotného bodu ve fázovém prostoru je vždy uzavřená (viz obr. 26). Za uzavřenou se považuje i trajektorie částice, která přilétne z nekonečna a zase se vrátí zpět (viz obr. 27).
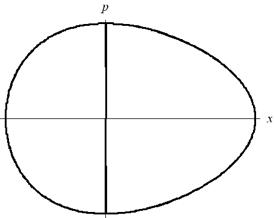 | 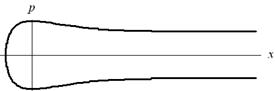 |
| Obr. 26 | Obr. 27 |