Axiomy statiky
Statika zkoumá rovnováhu (rovnovážnou polohu) tuhých těles a jejich soustav. Metody statiky využívají při řešení kromě Newtonových pohybových zákonů a momentové věty také tři základní axiomy statiky.
První axiom (rovnováha dvou sil)
Dvě síly působící na tuhé těleso jsou v rovnováze právě tehdy, jestliže jsou tyto síly stejně velké, působí na stejné nositelce a jsou navzájem opačně orientované.
Vektorová přímka, na které leží vektor dané síly, se také nazývá nositelka.
Druhý axiom (zachování pohybového stavu tělesa)
Pohybový stav tuhého tělesa se nezmění, jestliže k tomuto tělesu přidáme nebo od něj odebereme soustavu sil, které jsou v rovnováze.
Vzhledem k tomu, že tuhé těleso je nedeformovatelné účinkem libovolně velkých sil, nezpůsobí přidání soustavy sil, které jsou v rovnováze, žádné další změny v tělese (tj. nenastanou žádné deformace).
Třetí axiom (nahrazení dvou sil)
Dvě různoběžné síly lze nahradit silou jedinou, tzv. výslednicí, která je dána úhlopříčkou rovnoběžníku sestrojeného pomocí těchto sil.
Popsaná situace je zobrazena na obr. 116, na kterém jsou zobrazeny síly ![]() a
a ![]() a jejich výslednice
a jejich výslednice ![]() . Přitom platí:
. Přitom platí:
|
| (1) |
Vzhledem k tomu, že síly ![]() a
a ![]() jsou navzájem různoběžné, NEPLATÍ skalární vztah
jsou navzájem různoběžné, NEPLATÍ skalární vztah ![]() . Velikost výslednice by se musela počítat s využitím kosinové věty.
. Velikost výslednice by se musela počítat s využitím kosinové věty.
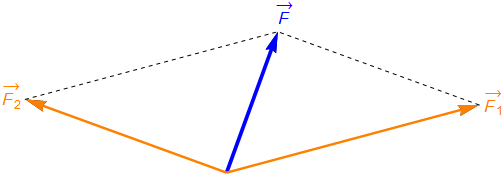 |
| Obr. 116 |
Na právě popsanou situaci lze také nahlížet tak, že byl proveden rozklad síly ![]() na dvě složky
na dvě složky ![]() a
a ![]() . Vztah (1) přitom zůstává v platnosti.
. Vztah (1) přitom zůstává v platnosti.
Z prvního axiomu statiky a ze druhého axiomu statiky vyplývá, že sílu lze po její vektorové přímce (nositelce) libovolně posouvat, aniž se změní účinek této síly na dané tuhé těleso. Posunem po nositelce dané síly se nemění ani moment sil, který popisuje otáčivé účinky dané síly na uvažované těleso.
Na základě třetího axiomu statiky je zřejmé, že tři různoběžné síly, které na těleso působí v jedné rovině, mohou být v rovnováze pouze tehdy, pokud jejich nositelky procházejí jedním bodem. Tato situace je zobrazena na obr. 117: síla ![]() uvádí do rovnováhy síly
uvádí do rovnováhy síly ![]() a
a ![]() resp. jejich výslednici
resp. jejich výslednici ![]() .
.
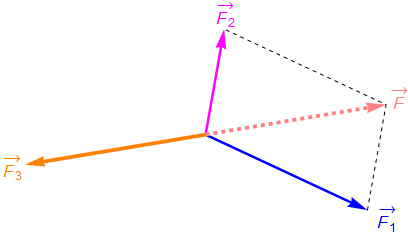 |
| Obr. 117 |
V případě, že tři síly v rovině neprocházejí jedním bodem daného tuhého tělesa, nastává vždy rotační pohyb tělesa. Situace je zobrazena na obr. 118: nositelky všech tří sil se neprotínají v jednom bodě, ale celková síla působící za zobrazené těleso je nulová. Celkový moment sil (vzhledem k těžišti tuhého tělesa) je ale nenulový, a proto tuhé těleso rotuje kolem osy procházející jeho těžištěm.
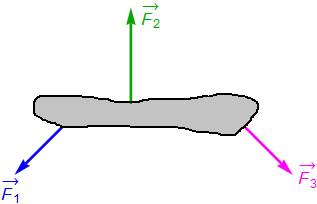 |
| Obr. 118 |