Operace s vektory
Uvažujme například vektor síly  . Na obr. 2 je znázorněna síla o velikosti 4 N. Tuto skutečnost zapisujeme zápisem:
. Na obr. 2 je znázorněna síla o velikosti 4 N. Tuto skutečnost zapisujeme zápisem:  . Velikost každého vektoru je skalár.
. Velikost každého vektoru je skalár.
Počáteční bod vektoru (bod A) určuje umístění vektoru, přímka procházející počátečním a koncovým bodem se nazývá vektorová přímka.
 |
| Obr. 2 |
S vektory lze provádět některé matematické operace:
1. násobení vektoru  nenulovým reálným číslem k (skalárem) - výsledný vektor
nenulovým reálným číslem k (skalárem) - výsledný vektor  je k-násobkem původního vektoru . Výsledný vektor je rovnoběžný s původním vektorem
je k-násobkem původního vektoru . Výsledný vektor je rovnoběžný s původním vektorem  a má stejný směr jako vektor , je-li k kladné. Pokud je k záporné, je výsledný vektor orientován opačně. Velikost výsledného vektoru je
a má stejný směr jako vektor , je-li k kladné. Pokud je k záporné, je výsledný vektor orientován opačně. Velikost výsledného vektoru je  .
.
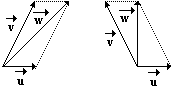
2. sčítání dvou vektorů - ve fyzice má jisté omezení: sčítat lze jen fyzikální veličiny téhož druhu (např. nelze sčítat sílu a rychlost, …). Součet dvou různoběžných vektorů  a - vektor
a - vektor  - sestrojíme jako úhlopříčku vektorového rovnoběžníku, jehož strany tvoří vektory a . Výsledek vektorového sčítání závisí nejen na velikosti jednotlivých vektorů, ale také na jejich směrech, tj. na úhlu, který oba vektory svírají (viz obr. 3).
Jsou-li vektory a rovnoběžné, stačí např. vektor přenést na vektorovou přímku vektoru tak, aby počáteční bod vektoru byl totožný s koncovým bodem vektoru .
- sestrojíme jako úhlopříčku vektorového rovnoběžníku, jehož strany tvoří vektory a . Výsledek vektorového sčítání závisí nejen na velikosti jednotlivých vektorů, ale také na jejich směrech, tj. na úhlu, který oba vektory svírají (viz obr. 3).
Jsou-li vektory a rovnoběžné, stačí např. vektor přenést na vektorovou přímku vektoru tak, aby počáteční bod vektoru byl totožný s koncovým bodem vektoru .
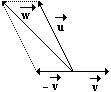
3. rozdíl vektorů - platí stejné omezení jako u sčítání vektorů: opět lze odčítat pouze fyzikální veličiny stejného druhu. Rozdíl  různoběžných vektorů a sestrojíme tak, že k vektoru přičteme vektor opačný k vektoru , tj. provedeme operaci
různoběžných vektorů a sestrojíme tak, že k vektoru přičteme vektor opačný k vektoru , tj. provedeme operaci  (viz obr. 4).
V případě rovnoběžných vektorů se jejich rozdíl provádí analogicky jako jejich součet.
(viz obr. 4).
V případě rovnoběžných vektorů se jejich rozdíl provádí analogicky jako jejich součet.
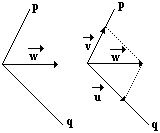
4. rozklad vektoru do dvou daných směrů - operace, která se ve fyzice používá velice často. V tomto případě hledáme dva takové vektory, které leží v daných směrech a jejichž vektorovým součtem dostaneme zadaný vektor. Máme-li např. vektor rozložit do směrů daných polopřímkami p a q, (viz obr. 5), uvědomíme si, že při sčítání dvou vektorů (dva nalezené vektory musí po sečtení dát vektor ) využíváme vektorového rovnoběžníku. V tomto případě postupujeme „odzadu“: koncovým bodem vektoru vedeme rovnoběžky s polopřímkami p, q. Průsečíky sestrojených rovnoběžek s polopřímkami p a q určují koncové body hledaných vektorů a . Vektor jsme tedy rozložili na dvě složky a , pro něž platí:  .
.
 |  |  |
| Obr. 3 | Obr. 4 | Obr. 5 |
Ve fyzice se používají ještě další dvě operace s vektory. A to skalární a vektorový součin.
Skalární součin dvou vektorů a je definován takto:  , kde příslušné vektory mají souřadnice
, kde příslušné vektory mají souřadnice  a
a  . Skalární součin je možné určit také vztahem
. Skalární součin je možné určit také vztahem  , kde
, kde  je úhel, který tyto vektory svírají. Jedná se vlastně o součin velikosti jednoho z vektorů a kolmého průmětu druhého vektoru do směru prvního vektoru (viz obr. 6). Výsledkem skalárního součinu dvou vektorů je tedy číslo. Budou-li vektory a nenulové, pak
je úhel, který tyto vektory svírají. Jedná se vlastně o součin velikosti jednoho z vektorů a kolmého průmětu druhého vektoru do směru prvního vektoru (viz obr. 6). Výsledkem skalárního součinu dvou vektorů je tedy číslo. Budou-li vektory a nenulové, pak  v případě, že vektory jsou na sebe vzájemně kolmé,
v případě, že vektory jsou na sebe vzájemně kolmé,  jestliže příslušné vektory svírají ostrý úhel a
jestliže příslušné vektory svírají ostrý úhel a  v případě, že svírají úhel tupý. Skalární součin lze aplikovat i na dva vektory v rovině.
v případě, že svírají úhel tupý. Skalární součin lze aplikovat i na dva vektory v rovině.
Vektorový součin dvou vektorů a (viz obr. 7)  je opět vektor, který je definován takto:
je opět vektor, který je definován takto:  , velikost
, velikost  vektoru je číselně rovna obsahu rovnoběžníku určeného vektory a , tj.
vektoru je číselně rovna obsahu rovnoběžníku určeného vektory a , tj.  ( je úhel, který svírají vektory a ) a je orientován vůči rovině vektorů a podle pravidla pravé ruky. Souřadnice vektoru jsou:
( je úhel, který svírají vektory a ) a je orientován vůči rovině vektorů a podle pravidla pravé ruky. Souřadnice vektoru jsou:  , kde a . Platí-li:
, kde a . Platí-li:  , pak
, pak  . Další podstatnou vlastností je
. Další podstatnou vlastností je  , tj. uvedená operace mezi vektory není komutativní. Vektorový součin je definován pouze pro dva vektory ze 3D prostoru.
, tj. uvedená operace mezi vektory není komutativní. Vektorový součin je definován pouze pro dva vektory ze 3D prostoru.
 |  |
| Obr. 6 | Obr. 7 |
Externí odkazy
- Skládání vektorů - názorný aplet simulující skládání vektorů v rovině
- Vektorový součin - aplet znázorňující základní vlastnosti vektorového součinu
- Skalární součin - aplet znázorňující základní vlastnosti skalárního součinu
Multimedialní obsah
 Audio č.1
Audio č.1
|
[2.45 MB] | [Uložit] |  Prezentace č.1
Prezentace č.1
|
[2.12 MB] | [Uložit] |