Tenzor setrvačnosti
Tenzor setrvačnosti zavedeme nejdříve bez ohledu na souřadnice; ty určíme až nakonec odvozování.
Tenzor setrvačnosti popisuje setrvačné vlastnosti tuhého tělesa vůči rotačnímu pohybu.
Tenzor setrvačnosti tedy udává nechuť tuhého tělesa k rotačnímu pohybu analogicky, jako udává hmotnost (setrvačná hmotnost) hmotného bodu nechuť k jeho translačnímu pohybu.
Vyjdeme z celkového momentu hybnosti ![]() tuhého tělesa, který je definován vztahem
tuhého tělesa, který je definován vztahem
| (258) |
ve kterém se sčítá přes všechny body tuhého tělesa, tj. od jedné do N. Každý bod tuhého tělesa je charakterizován hmotností ![]() , polohovým vektorem
, polohovým vektorem ![]() a hustota objemového elementu je
a hustota objemového elementu je ![]() - viz obr. 64.
- viz obr. 64.
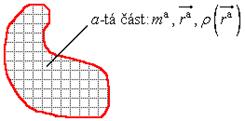 |
| Obr. 64 |
Vztah (258) můžeme dále upravit s využitím definice hybnosti a s využitím vlastností vektorového součinu. Dostáváme tak ![]() . S využitím vztahu (241) pak můžeme v úpravách pokračovat:
. S využitím vztahu (241) pak můžeme v úpravách pokračovat:  . Platí
. Platí ![]() , neboť popisujeme pohyb tuhého tělesa jako jednoho celku a jeho jednotlivé elementy se proto vzhledem k sobě nepohybují. Můžeme tedy psát
, neboť popisujeme pohyb tuhého tělesa jako jednoho celku a jeho jednotlivé elementy se proto vzhledem k sobě nepohybují. Můžeme tedy psát
| (259) |
Pravdivost rovnosti ![]() je zřejmá v analogii s pohybujícím se dětským kolotočem: koník, autíčko, … na dětském kolotoči jsou vzhledem ke kolotoči v klidu.
je zřejmá v analogii s pohybujícím se dětským kolotočem: koník, autíčko, … na dětském kolotoči jsou vzhledem ke kolotoči v klidu.
Nyní vezmeme libovolný pomocný vektor ![]() , který zatím nemá žádný fyzikální smysl, a do jeho směru promítneme vektor momentu hybnosti
, který zatím nemá žádný fyzikální smysl, a do jeho směru promítneme vektor momentu hybnosti ![]() . Následující úvahy provedeme obecně a teprve až potom dáme vektoru
. Následující úvahy provedeme obecně a teprve až potom dáme vektoru ![]() fyzikální význam. Promítnutí vektoru
fyzikální význam. Promítnutí vektoru ![]() do směru vektoru
do směru vektoru ![]() provedeme pomocí skalárního součinu těchto dvou vektorů. S využitím vztahu (259) dostaneme
provedeme pomocí skalárního součinu těchto dvou vektorů. S využitím vztahu (259) dostaneme
| (260) |
Uvědomíme-li si, že absolutní hodnota smíšeného součinu vektorů ![]() ,
, ![]() a
a ![]() ve tvaru
ve tvaru ![]() určuje objem rovnoběžnostěnu, jehož tři strany vycházející z jednoho jeho vrcholu jsou reprezentovány vektory
určuje objem rovnoběžnostěnu, jehož tři strany vycházející z jednoho jeho vrcholu jsou reprezentovány vektory ![]() ,
, ![]() a
a ![]() , je zřejmé, že uvedený zápis smíšeného součinu můžeme psát v dalších tvarech. Uvedené pořadí násobení vektorů totiž není jediné - při určování objemu rovnoběžnostěnu nezávisí na tom, v jakém pořadí vynásobíme délky jeho stran vycházejících z jednoho jeho vrcholu.
, je zřejmé, že uvedený zápis smíšeného součinu můžeme psát v dalších tvarech. Uvedené pořadí násobení vektorů totiž není jediné - při určování objemu rovnoběžnostěnu nezávisí na tom, v jakém pořadí vynásobíme délky jeho stran vycházejících z jednoho jeho vrcholu.
Vztah (260) lze tedy přepsat ve tvaru ![]() a definovat bilineární zobrazení
a definovat bilineární zobrazení ![]() předpisem
předpisem
| (261) |
na které lze nahlížet jako na funkci dvou proměnných ![]() a
a ![]() .
.
Hmotnosti ![]() a polohové vektory
a polohové vektory ![]() jsou dány vyšetřovaným tuhým tělesem, vektory
jsou dány vyšetřovaným tuhým tělesem, vektory ![]() a
a ![]() vstupují do popisu tuhého tělesa „zvenčí“.
vstupují do popisu tuhého tělesa „zvenčí“.
Vztah (261) definuje bilineární zobrazení proto, že vztah (261) je lineární v obou argumentech (součet i součin jsou lineární operace). Dvěma vektorům je tímto zobrazením přiřazeno reálné číslo, což je schéma této struktury. Matematicky je ovšem tímto předpisem definován tenzor.
Vztahem (261) jsme tedy definovali tenzor druhého řádu - v našem případě to je tenzor setrvačnosti.
Fakt, že se jedná o tenzor druhého řádu vyplývá z toho, že k jeho určení jsou nutné dva vektory.
Ve speciálním případě lze vztah (261) psát ve tvaru ![]() . Kinetickou energii T rotujícího tuhého tělesa lze tedy psát ve tvaru
. Kinetickou energii T rotujícího tuhého tělesa lze tedy psát ve tvaru
| (262) |
Dále bychom rádi vyjádřili prvky ![]() matice I. K tomu je ale nutné zavést bázi, v níž vyjádříme všechny vektory v uvažovaném vztahu (v tomto případě vztah (262)). Pro obecný tenzor
matice I. K tomu je ale nutné zavést bázi, v níž vyjádříme všechny vektory v uvažovaném vztahu (v tomto případě vztah (262)). Pro obecný tenzor ![]() platí:
platí: ![]() , odkud vyplývá, že
, odkud vyplývá, že
| (263) |
S využitím vztahu (263) můžeme psát ![]() , takže dostáváme
, takže dostáváme
| (264) |
Správně bychom měli rozlišovat psaní horních indexů a dolních indexů, ale zde to není nutné, neboť lokálně pracujeme v kartézských souřadnicích (v kartézské bázi).
Nyní můžeme vyjádřit tenzor ![]() definovaný vztahem (261) ve složkách báze
definovaný vztahem (261) ve složkách báze ![]() . Můžeme proto psát
. Můžeme proto psát ![]() a tedy
a tedy
| (265) |
Matice ![]() je symetrická matice typu
je symetrická matice typu ![]() , jejíž symetričnost vyplývá přímo z její definice (261): skalární součin (pomocí kterého je definována) je totiž komutativní. To znamená, že matice má šest nezávislých prvků.
, jejíž symetričnost vyplývá přímo z její definice (261): skalární součin (pomocí kterého je definována) je totiž komutativní. To znamená, že matice má šest nezávislých prvků.
Dříve než budeme pokračovat v dalších úpravách vztahu (261), si uvědomíme, že každý vektor ![]() (tj. pro všechny přípustné hodnoty a) lze rozepsat pomocí vektorů báze, v níž popisujeme celý pohyb, ve tvaru
(tj. pro všechny přípustné hodnoty a) lze rozepsat pomocí vektorů báze, v níž popisujeme celý pohyb, ve tvaru
| (266) |
kde ![]() je k-tá souřadnice a-tého vektoru.
je k-tá souřadnice a-tého vektoru.
S využitím vztahů (263) a (266) můžeme nyní vztah (261) psát ve tvaru:
![]() . Uvědomíme-li si, že výraz
. Uvědomíme-li si, že výraz ![]() představuje r-tou složku naznačeného vektorového součinu, můžeme pokračovat v úpravách:
představuje r-tou složku naznačeného vektorového součinu, můžeme pokračovat v úpravách:
![]() . Dostáváme tedy
. Dostáváme tedy
| (267) |
Pokud si nyní představíme, že tuhé těleso, které popisujeme, je složeno z krychliček (resp. hranolků) s různou hustotou ![]() , můžeme provést spojitou limitu vztahu (267) a získáme
, můžeme provést spojitou limitu vztahu (267) a získáme
| (268) |
což jsou složky tenzoru setrvačnosti popisující spojité prostředí. ![]() ,
, ![]() a
a ![]() jsou souřadnice polohového vektoru vyjádřené v bázi, v níž počítáme.
jsou souřadnice polohového vektoru vyjádřené v bázi, v níž počítáme.
Platí několik základních vztahů pro počítání ve složkách tenzoru setrvačnosti ![]() . První z nich je triviální a vyplývá přímo ze vztahu (267) resp. (268):
. První z nich je triviální a vyplývá přímo ze vztahu (267) resp. (268):
| (269) |
Záměnou indexů se v sumě resp. v integrandu nic nezmění.
S využitím vztahů (260) a (261) můžeme psát ![]() . S využitím vztahu (265) můžeme ve složkách psát
. S využitím vztahu (265) můžeme ve složkách psát ![]() a tedy
a tedy
| (270) |
Dále můžeme vztah (262) s využitím vztahu (265) rozepsat ve složkách báze a získáme
| (271) |
Kinetickou energii T lze vyjádřit v zobecněných souřadnicích, kterými jsou v případě popisu rotace tuhého tělesa Eulerovy úhly. Za ![]() ,
, ![]() a
a ![]() tedy můžeme dosadit z Eulerových kinematických rovnic (257). Získáme tak vyjádření kinetické energie v zobecněných souřadnicích, můžeme vypočítat Lagrangeovu funkci definovanou vztahem (48) a řešit Lagrangeovy rovnice druhého druhu (47).
tedy můžeme dosadit z Eulerových kinematických rovnic (257). Získáme tak vyjádření kinetické energie v zobecněných souřadnicích, můžeme vypočítat Lagrangeovu funkci definovanou vztahem (48) a řešit Lagrangeovy rovnice druhého druhu (47).
Matice I je symetrická matice, což znamená, že je možné jí pomocí vlastních čísel a vlastních vektorů diagonalizovat. Vlastní vektory lze v případě matice tenzoru setrvačnosti volit na osách kartézského systému souřadnic. Volbou ortogonální báze pak získáme hlavní čísla matice I přímo na její hlavní diagonále. Proto platí
| (272) |
kde ![]() je vlastní vektor matice I a
je vlastní vektor matice I a ![]() vlastní číslo matice I.
vlastní číslo matice I.
Ve vztahu (272) je na levé straně vektor, který má obecně jiný směr a jinou velikost než vektor na pravé straně tohoto vztahu. A právě vztah (272) určuje podmínku pro nalezení takového vektoru ![]() , jehož směr se nezmění po aplikaci matice I. Velikost může být jiná - to se případně „dorovná“ koeficientem
, jehož směr se nezmění po aplikaci matice I. Velikost může být jiná - to se případně „dorovná“ koeficientem ![]() .
.
Ortogonální báze tvořená vektory ![]() ,
, ![]() a
a ![]() , které jsou zároveň i vlastními vektory matice I, určují hlavní osy tuhého tělesa resp. hlavní osy tenzoru setrvačnosti, který lze psát ve tvaru
, které jsou zároveň i vlastními vektory matice I, určují hlavní osy tuhého tělesa resp. hlavní osy tenzoru setrvačnosti, který lze psát ve tvaru
 , , | (273) |
kde ![]() ,
, ![]() a
a ![]() jsou vlastní čísla matice I.
jsou vlastní čísla matice I.
Vlastní čísla matice I byla ve vztahu (272) označena symbolem ![]() , ve vztahu (273) byla označena jako
, ve vztahu (273) byla označena jako ![]() ,
, ![]() a
a ![]() . Vztah (272) je „matematická definice“ vlastních čísel a vlastních vektorů matice, zatímco vztah (273) definuje fyzikální veličinu: tenzor setrvačnosti.
. Vztah (272) je „matematická definice“ vlastních čísel a vlastních vektorů matice, zatímco vztah (273) definuje fyzikální veličinu: tenzor setrvačnosti.
Každé těleso má tedy tři takové osy, pro které má tenzor setrvačnosti tvar daný výrazem (273), tj. má jen tři nezávislé složky na hlavní diagonále. Tyto tři uvažované osy tuhého tělesa procházejí jeho těžištěm a nazývají se hlavní osy tuhého tělesa. Proto se zkonkretizuje zápis vztahů (270) a (271), které přejdou na vztahy:
| (274) |
a
| (275) |