Obecné odvození
Potenciální energie tělesa (např. planeta) o hmotnosti m, které se pohybuje kolem centrálního tělesa (např. Slunce) o hmotnosti M ve vzdálenosti r, je dána vztahem
| (89) |
kde G je gravitační konstanta.
Tvar trajektorie tělesa, které se pohybuje v poli centrální síly, získáme pomocí Binetova vzorce (88). S využitím substituce (86) můžeme psát ![]() a tedy
a tedy ![]() . Dosazením do (88) získáme rovnici pro neznámou
. Dosazením do (88) získáme rovnici pro neznámou ![]()
| (90) |
která má řešení ve tvaru ![]() . S využitím substituce (86) tedy dostáváme
. S využitím substituce (86) tedy dostáváme  , což můžeme zapsat v zjednodušeném tvaru
, což můžeme zapsat v zjednodušeném tvaru
| (91) |
kde
| (92) |
Je důležité si uvědomit, že r, u a ![]() jsou funkce závislé na čase.
jsou funkce závislé na čase.
Konstantu ![]() určíme tak, že dosadíme řešení (91) s využitím substituce (86) do rovnice (87). Předtím vyjádříme
určíme tak, že dosadíme řešení (91) s využitím substituce (86) do rovnice (87). Předtím vyjádříme ![]() a
a ![]() . Po dosazení do (87) dostaneme
. Po dosazení do (87) dostaneme ![]() . Dále můžeme psát
. Dále můžeme psát ![]() a s využitím vztahu (92) upravit na tvar
a s využitím vztahu (92) upravit na tvar ![]() , odkud
, odkud
| (93) |
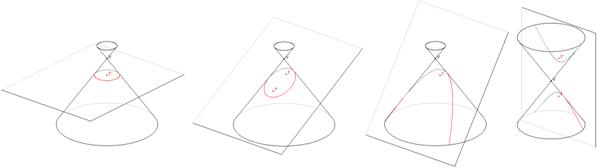 |
| Obr. 36 |
Rovnice (91) spolu s podmínkami (92) a (93) vyjadřuje rovnici kuželosečky v polárních souřadnicích. Parametr p přitom určuje velikost kuželosečky, zatímco parametr ![]() , který se nazývá numerická excentricita, určuje celkovou mechanickou energii tělesa, která se díky platnosti zákona zachování mechanické energie zachovává. V závislosti na parametru
, který se nazývá numerická excentricita, určuje celkovou mechanickou energii tělesa, která se díky platnosti zákona zachování mechanické energie zachovává. V závislosti na parametru ![]() lze přitom získat jednu ze čtyř kuželoseček (viz obr. 36):
lze přitom získat jednu ze čtyř kuželoseček (viz obr. 36):
1. pro ![]() kružnici - což je křivka, po níž se pohybuje těleso s minimální energií, kterou je možné odvodit ze vztahu (93):
kružnici - což je křivka, po níž se pohybuje těleso s minimální energií, kterou je možné odvodit ze vztahu (93):
| (94) |
2. pro ![]() elipsu, přičemž
elipsu, přičemž ![]() popisuje perihélium trajektorie daného tělesa a
popisuje perihélium trajektorie daného tělesa a ![]() odpovídá aféliu dané trajektorie (viz obr. 37). Energie, kterou má pohybující se těleso, je záporná.
odpovídá aféliu dané trajektorie (viz obr. 37). Energie, kterou má pohybující se těleso, je záporná.
3. pro ![]() parabolu, protože pro
parabolu, protože pro ![]() se trajektorii otvírá. Energie tělesa je nulová.
se trajektorii otvírá. Energie tělesa je nulová.
4. pro ![]() hyperbolu, trajektorie se otvírá dříve než při
hyperbolu, trajektorie se otvírá dříve než při ![]() a těleso má kladnou energii.
a těleso má kladnou energii.
Typ kuželosečky v závislosti na energii tělesa lze určit pomocí efektivního potenciálu.
Z obr. 36 je vidět, že kuželosečky lze získat i tak, jak vyplývá z jejich názvu: lze „seknout“ kužel rovinou, která má pro každou kuželosečku určitou speciální polohu.
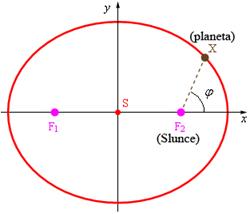 |
| Obr. 37 |
Při odvozování obecného tvaru trajektorie jsme se mohli omezit na popis pomocí dvou souřadnic, neboť pohyb v poli centrální síly je vždy pohyb rovinný. Navíc popis pomocí lagrangeových rovnic vede na dva integrály pohybu - v našem konkrétním případě se zachovává moment hybnosti l a celková mechanická energie E.
Na základě obecného odvození a na základě geometrického významu řešení (91) lze nyní formulovat Keplerovy zákony, které popisují pohyb planet ve Sluneční soustavě.
Autorem Kepleových zákonů je německý matematik Johannes Kepler (1571 - 1630). Odvodil je na základě pozorování, která prováděl dánský astronom Tycho Brahe. První a druhý Keplerův zákon byly publikovány v Astronomia nova (Nová astronomie) vydané v roce 1609 v Praze, třetí Keplerův zákon pak v roce 1619 v Linci v díle Harmoniae mundi (Harmonie světa).