Uživatelský segment
Uživatelský segment je tvořen přístrojem GPS: jedná se o pasivní přístroj, který nevysílá žádná data, ale pouze přijímá data vyslaná satelity (tzv. almanach).
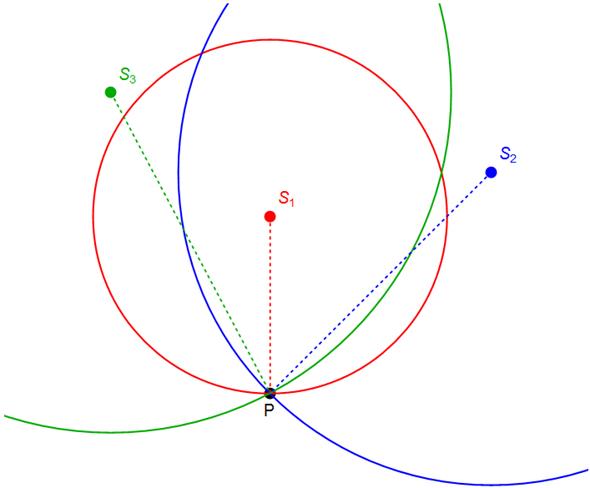
Princip určení polohy pozorovatele vysvětlíme nejdříve na situaci v rovině. Polohu pozorovatele (na zjednodušeném obr. 188 je to bod P) určíme na základě vzdáleností od tří vybraných bodů ![]() ,
, ![]() a
a ![]() . Pokud bychom znali pouze vzdálenost x od bodu
. Pokud bychom znali pouze vzdálenost x od bodu ![]() , mohl by se pozorovatel nacházet kdekoliv na kružnici s poloměrem x a středem právě v bodě
, mohl by se pozorovatel nacházet kdekoliv na kružnici s poloměrem x a středem právě v bodě ![]() . Známe-li také vzdálenost pozorovatele od bodu
. Známe-li také vzdálenost pozorovatele od bodu ![]() , připadají v úvahu už jen dva body (dvě uvažované kružnice se protnou ve dvou bodech). Známe-li navíc vzdálenost od třetího bodu (který není shodný ani s jedním z dříve zmíněných bodů), určíme polohu pozorovatele jednoznačně. (Pokud ovšem vzdálenosti odpovídají realitě a uvažované tři kružnice se skutečně navzájem protnou.)
, připadají v úvahu už jen dva body (dvě uvažované kružnice se protnou ve dvou bodech). Známe-li navíc vzdálenost od třetího bodu (který není shodný ani s jedním z dříve zmíněných bodů), určíme polohu pozorovatele jednoznačně. (Pokud ovšem vzdálenosti odpovídají realitě a uvažované tři kružnice se skutečně navzájem protnou.)
 |
| Obr. 188 |
V prostoru je situace komplikovanější, ale princip zůstává stejný. Nejdříve je nutné připomenout základní polohové vztahy tří sfér. Dvě sféry nemusejí mít společný žádný bod (tomu odpovídají dva případy), mohou se dotknout v jednom bodě (opět můžeme mít dva případy) nebo se protnout v kružnici. Při hledání souřadnic pozorovatele nás zajímá poslední zmíněný případ. Tato situace je zobrazena na obr. 189. V případě tří sfér je v souvislosti se systémem GPS zajímavá situace, kdy třetí sféra protne zmiňovanou kružnici ve dvou dalších bodech (viz obr. 190).
Na obr. 190 je zobrazen pozorovatel v bodě P, do kterého dospěl signál ze satelitů ![]() ,
, ![]() a
a ![]() . Ze satelitu
. Ze satelitu ![]() se signál za dobu
se signál za dobu ![]() , za kterou dospěl do bodu P, rozšířil do všech bodů sféry o poloměru
, za kterou dospěl do bodu P, rozšířil do všech bodů sféry o poloměru ![]() (c je velikost rychlosti světla ve vakuu) a středem právě v bodě
(c je velikost rychlosti světla ve vakuu) a středem právě v bodě ![]() . Analogicky dospěl do bodu P signál ze satelitů
. Analogicky dospěl do bodu P signál ze satelitů ![]() a
a ![]() . Tyto tři sféry se tedy protínají v bodech P a Q. Pokud si uvědomíme, že bod P leží na Zemi a tedy že Země je čtvrtou sférou, je poloha pozorovatele určena jednoznačně. Lze též využít další satelity, které také jednoznačně identifikují bod P.
. Tyto tři sféry se tedy protínají v bodech P a Q. Pokud si uvědomíme, že bod P leží na Zemi a tedy že Země je čtvrtou sférou, je poloha pozorovatele určena jednoznačně. Lze též využít další satelity, které také jednoznačně identifikují bod P.
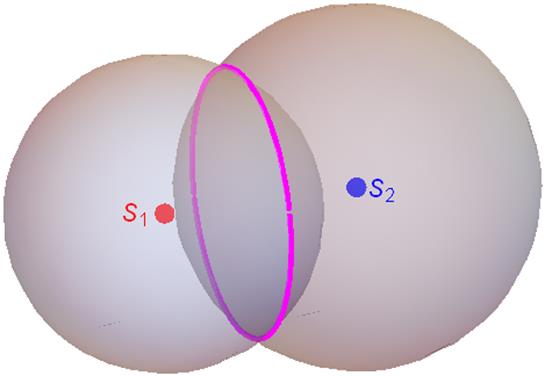 |
| Obr. 189 |
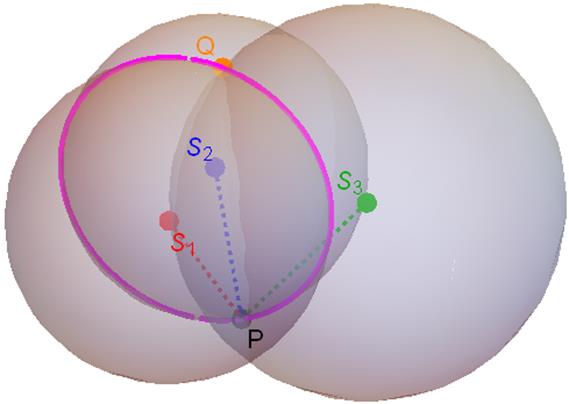 |
| Obr. 190 |
Právě popsaný model by fungoval za předpokladu, že i pozorovatel by měl přesný čas daný atomovými hodinami. To je ovšem v praxi nemožné, aby s sebou pozorovatel nosil nákladné a rozměrné atomové hodiny. Proto se výše popsané tři sféry neprotnou v jednom bodě, ale vytvoří určitou plochu. Příjmem signálu z dalších satelitů je možné provést korekce GPS a vypočtenou polohu pozorovatele opravit, a tím eliminovat nutnost, aby měl pozorovatel přesné atomové hodiny.