Silový a vláknový obrazec
Úlohu grafického skládání obecné soustavy sil lze rozdělit na dvě části:
1. s využitím silového obrazce najdeme velikost a směr výslednice skládaných sil;
2. s využitím vláknového obrazce určíme polohu výslednice, tj. najdeme bod, kterým výslednice (resp. její nositelka) prochází.
Posuvné účinky sil na dané těleso poloha nositelky nezmění. Změnou nositelky síly (i když bude tato síla posunuta rovnoběžně s původní nositelkou) se ale změní otáčivé účinky síly, tj. změní se výsledný moment sil. Proto je nutné i polohu nositelky určit jednoznačně.
Silový obrazec je grafickým vyjádřením geometrického (vektorového) součtu sil.
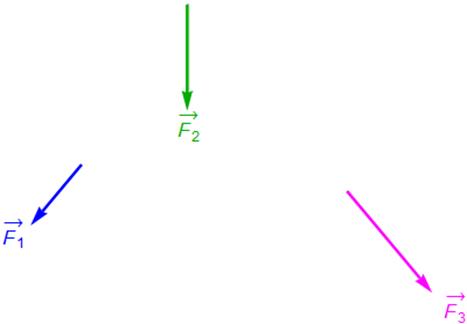
Postup vytváření silového obrazce ukážeme na konkrétní úloze. Budeme uvažovat obecnou rovinnou soustavu sil ![]() ,
, ![]() a
a ![]() zobrazenou na obr. 141. Při sestrojování silového obrazce postupujeme takto:
zobrazenou na obr. 141. Při sestrojování silového obrazce postupujeme takto:
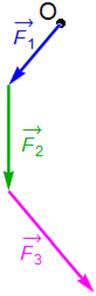
1. Zvolíme počáteční bod O silového obrazce.
2. Do bodu O přeneseme ve zvoleném měřítku první skládanou sílu ![]() .
.
3. Do koncového bodu vektoru síly ![]() přeneseme druhou skládanou sílu
přeneseme druhou skládanou sílu ![]() (ve stejném měřítku, v jakém byla přenesena síla
(ve stejném měřítku, v jakém byla přenesena síla ![]() ). Takto přeneseme do silového obrazce postupně všechny skládané síly (viz obr. 142).
). Takto přeneseme do silového obrazce postupně všechny skládané síly (viz obr. 142).
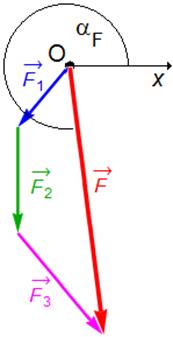
4. Výslednici ![]() skládaných sil do silového obrazce zakreslíme jako vektor, který má počátek v počátku vektoru první síly (tj. v bodě O) a koncový bod v koncovém bodě vektoru poslední skládané síly (viz obr. 143).
skládaných sil do silového obrazce zakreslíme jako vektor, který má počátek v počátku vektoru první síly (tj. v bodě O) a koncový bod v koncovém bodě vektoru poslední skládané síly (viz obr. 143).
Tímto postupem jsme vytvořili silový obrazec, ze kterého lze jednoznačně určit velikost výslednice ![]() (ve stejném měřítku, v jakém byly v silovém obrazci zobrazovány skládané síly) a její směr. Nemáme ale žádné informace o konkrétní poloze nositelky výslednice, tj. neznáme bod, kterým bude výslednice (resp. její nositelka) procházet.
(ve stejném měřítku, v jakém byly v silovém obrazci zobrazovány skládané síly) a její směr. Nemáme ale žádné informace o konkrétní poloze nositelky výslednice, tj. neznáme bod, kterým bude výslednice (resp. její nositelka) procházet.
Zvolíme-li bod O v jiném místě roviny, bude zakreslená síla ležet v jiném místě roviny. Ve všech možných případech (tj. při všech možných volbách bodu O) budou ale vektory výslednice navzájem rovnoběžné. Posuvný pohyb tělesa, na které působí zadaná soustava skládaných sil, tedy ovlivněn nebude, ale bude ovlivněna rotace tohoto tělesa. Proto je nutné polohu výslednice určit jednoznačně.
Na základě silového obrazce lze (v případě, že byl silový obrazec správně a přesně narýsován) určit i úhel ![]() , který svírá výslednice s určitou vybranou přímkou - např. se směrem kladné části osy x (viz obr. 144).
, který svírá výslednice s určitou vybranou přímkou - např. se směrem kladné části osy x (viz obr. 144).
 |
| Obr. 141 |
 |  |  |
| Obr. 142 | Obr. 143 | Obr. 144 |
Bod, kterým prochází nositelka výslednice, lze nalézt pomocí vláknového obrazce. Nejdříve vysvětlíme postup alternativního skládání sil, který je relativně složitý. Na závěr ale zjistíme, že tento postup lze výrazně zredukovat a v podstatě postupovat zpětně, čím se hledání vláknového obrazce velmi zjednoduší.
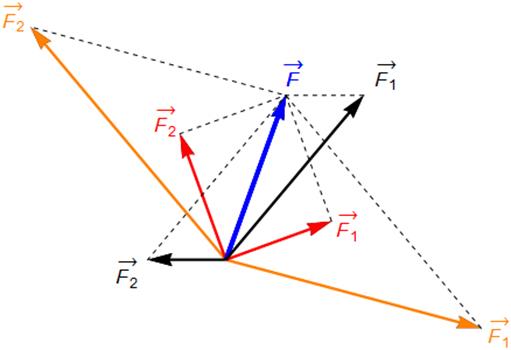
Nejdříve je nutné si uvědomit, že danou sílu lze rozložit nekonečně mnoha způsoby na dvě složky (na obr. 145 jsou zobrazeny pouze tři takové rozklady). Při řešení konkrétních úloh (jízda cyklisty zatáčkou, těleso na nakloněné rovině, kmitání matematického kyvadla, …) jsou směry, na které některé síly rozkládáme jednoznačně určené (vozovka, po níž cyklista jede, a směr náklonu cyklisty; směr nakloněné roviny a směr k němu kolmý; směr závěsu matematického kyvadla; …), a proto jsou i jednoznačně určené složky rozkládané síly.
 |
| Obr. 145 |
Zadanou rovinnou soustavu sil ![]() ,
, ![]() a
a ![]() (zobrazenou na obr. 141) nahradíme ekvivalentní soustavou sil
(zobrazenou na obr. 141) nahradíme ekvivalentní soustavou sil ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() a
a ![]() , která má s původní soustavou sil stejnou výslednici. Při hledání této ekvivalentní soustavy sil postupujeme takto:
, která má s původní soustavou sil stejnou výslednici. Při hledání této ekvivalentní soustavy sil postupujeme takto:
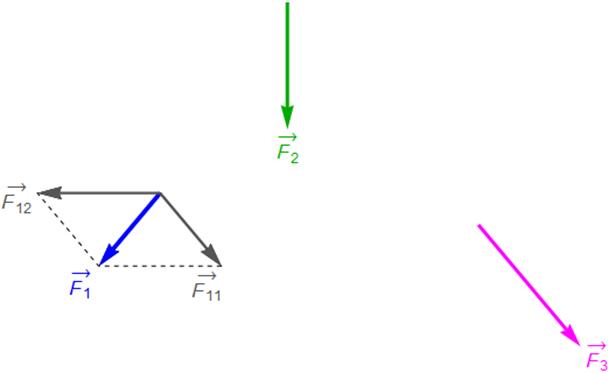
1. Sílu ![]() nahradíme libovolnými dvěma silami
nahradíme libovolnými dvěma silami ![]() a
a ![]() tak, že sílu
tak, že sílu ![]() rozložíme do dvou libovolných směrů (viz obr. 146).
rozložíme do dvou libovolných směrů (viz obr. 146).
V tomto kroku je rozumné jeden směr (tj. směr jedné ze složek síly ![]() ) volit pokud možno co nejjednodušeji (např. vodorovně - viz obr. 146).
) volit pokud možno co nejjednodušeji (např. vodorovně - viz obr. 146).
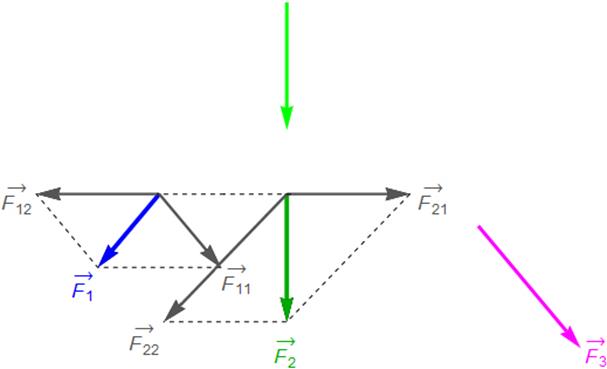
2. Sílu ![]() rozložíme na dvě složky, ale už ne na libovolné. Jedna ze složek bude mít opačný směr a stejnou velikost, jako jedna ze složek síly
rozložíme na dvě složky, ale už ne na libovolné. Jedna ze složek bude mít opačný směr a stejnou velikost, jako jedna ze složek síly ![]() . Před vlastním rozkladem sílu
. Před vlastním rozkladem sílu ![]() posuneme po její nositelce tak, aby obě opačně orientované stejně velké složky ležely na stejné nositelce (viz obr. 147).
posuneme po její nositelce tak, aby obě opačně orientované stejně velké složky ležely na stejné nositelce (viz obr. 147).
V případě zobrazeném na obr. 147 je síla ![]() rozložena na síly
rozložena na síly ![]() a
a ![]() . Síly
. Síly ![]() a
a ![]() se tedy podle prvního axiomu statiky navzájem ve svých účincích ruší.
se tedy podle prvního axiomu statiky navzájem ve svých účincích ruší.
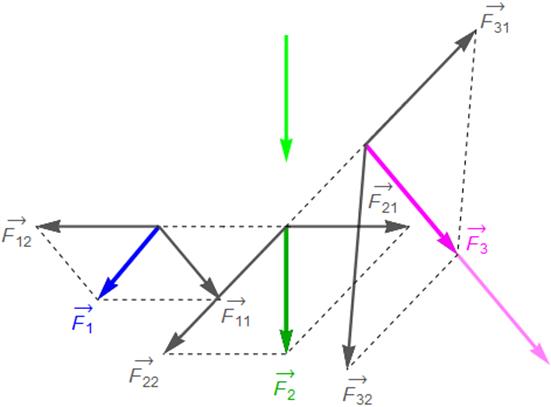
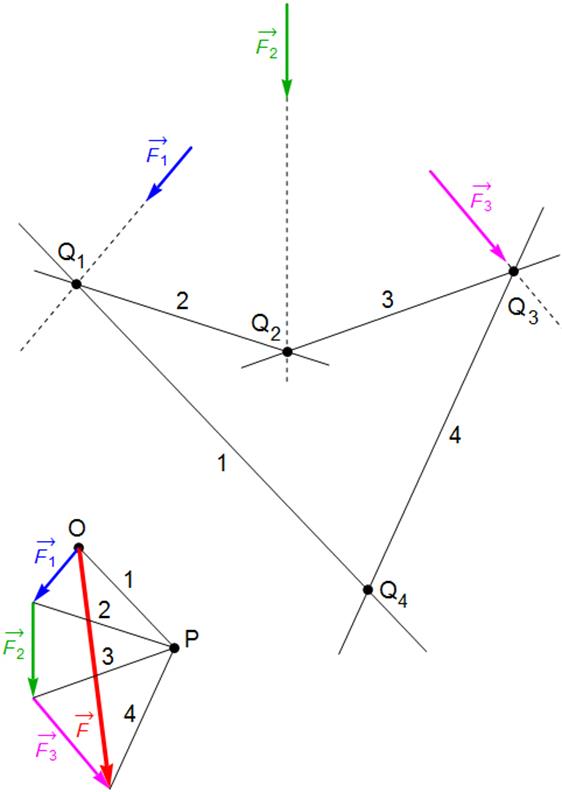
3. Analogicky postupujeme dále - rozložíme další sílu na dvě složky tak, aby jedna z těchto složek měla stejnou velikost a opačný směr jako jedna ze složek síly rozložené v minulém kroku (viz obr. 148).
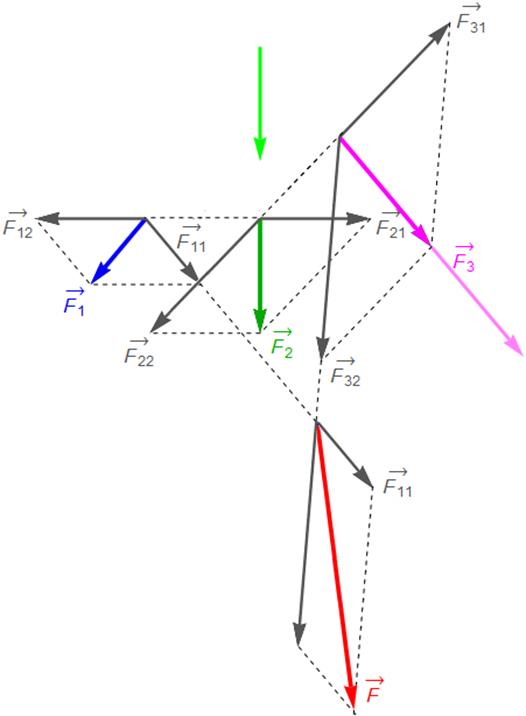
4. Kromě sil ![]() a
a ![]() se všechny ostatní síly ve svých účincích navzájem ruší. Výslednici
se všechny ostatní síly ve svých účincích navzájem ruší. Výslednici ![]() tedy určíme pouze pomocí sil
tedy určíme pouze pomocí sil ![]() a
a ![]() (viz obr. 149).
(viz obr. 149).
Vzhledem k tomu, že soustava sil ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() a
a ![]() je ekvivalentní s původní soustavou sil
je ekvivalentní s původní soustavou sil ![]() ,
, ![]() a
a ![]() , je výslednice obou soustav sil stejná. Výslednice tedy musí procházet průsečíkem nositelek sil
, je výslednice obou soustav sil stejná. Výslednice tedy musí procházet průsečíkem nositelek sil ![]() a
a ![]() , tj. průsečíkem nositelek první a poslední síly ekvivalentní soustavy sil. Tímto způsobem byl tedy nalezen bod, kterým prochází nositelka výslednice
, tj. průsečíkem nositelek první a poslední síly ekvivalentní soustavy sil. Tímto způsobem byl tedy nalezen bod, kterým prochází nositelka výslednice ![]() původní soustavy sil.
původní soustavy sil.
Na základě silového obrazce jsme nalezli velikost a směr výslednice ![]() , pomocí výše uvedeného postupu jsme pak našli bod, kterým prochází nositelka výslednice. Samotné působiště síly
, pomocí výše uvedeného postupu jsme pak našli bod, kterým prochází nositelka výslednice. Samotné působiště síly ![]() by bylo vázáno na těleso, na které zadaná soustava sil působí.
by bylo vázáno na těleso, na které zadaná soustava sil působí.
 |
| Obr. 146 |
 |
| Obr. 147 |
 |
| Obr. 148 |
 |
| Obr. 149 |
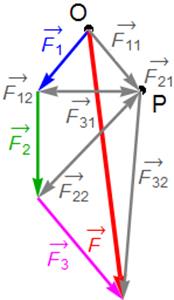
Nyní můžeme všechny síly ekvivalentní soustavy přenést do silového obrazce; původní silový obrazec je zobrazen na obr. 143, obrazec s doplněnými silami ekvivalentní soustavy je zobrazen na obr. 150. Je zřejmé, že všechny síly ekvivalentní soustavy sil se protnou v jednom bodě; ten se značí P a nazývá se pól. Vzhledem k tomu, že se vždy dvě síly této soustavy navzájem ve svých účincích ruší, není nutné do silového obrazce přenášet přímo síly (tj. s vyznačenými směry působení), ale stačí přenést jen nositelky těchto sil (viz obr. 151).
 |  |
| Obr. 150 | Obr. 151 |
Vzhledem k tomu, že byly směry ekvivalentní soustavy sil zvoleny libovolně, je také poloha bodu P libovolná. Poloha bodu P tedy závisí pouze na volbě ekvivalentní soustavy sil (a ta je volena libovolně). Proto je možné celý postup obrátit a tím i zjednodušit.
Zjednodušený a přehledný postup je tedy tento:
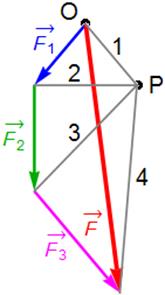
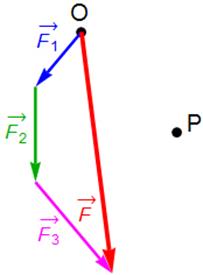
1. Vedle silového obrazce zvolíme libovolně bod P (viz obr. 152).
Záměrně je na obr. 152 volen jiný pól, než je pól, který byl sestrojen na základě popsané konstrukce a který je zobrazen na obr. 150 a obr. 151.
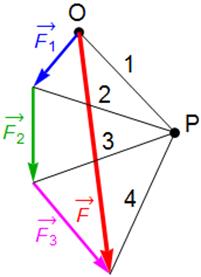
2. Bod P spojíme s počátečními body a koncovými body všech sil silového obrazce (viz obr. 153). Tyto spojnice (vlákna), které vlastně představují nositelky sil ekvivalentní soustavy sil, očíslujeme.
Směry sil není nutné zakreslovat, protože vždy dvě síly se navzájem ve svých účincích vyruší; zajímá nás tedy pouze směr těchto sil, tj. nositelky těchto sil.
Vláken je vždy o jedno více, než je počet skládaných sil.
3. Vlákna přeneseme rovnoběžně na nositelky původních sil (viz obr. 154).
Nejdříve přeneseme první vlákno tak, aby protínalo v libovolném bodě (na obr. 154 je to bod ![]() ) nositelku první síly. Tímto bodem bude současně procházet i druhé vlákno. Třetí vlákno prochází průsečíkem druhého vlákna a nositelky druhé síly (tj. bodem
) nositelku první síly. Tímto bodem bude současně procházet i druhé vlákno. Třetí vlákno prochází průsečíkem druhého vlákna a nositelky druhé síly (tj. bodem ![]() ), čtvrté vlákno prochází průsečíkem třetího vlákna a nositelky třetí síly, … Poslední vlákno pak prochází průsečíkem předposledního vlákna s nositelkou poslední síly (v našem případě tedy bodem
), čtvrté vlákno prochází průsečíkem třetího vlákna a nositelky třetí síly, … Poslední vlákno pak prochází průsečíkem předposledního vlákna s nositelkou poslední síly (v našem případě tedy bodem ![]() ).
).
4. Průsečík prvního a posledního vlákna určuje bod, kterým bude procházet výslednice hledaných sil (viz obr. 155).
Výslednice (tj. její velikost a směr) je známa ze silového obrazce. Nyní známe i bod (v našem případě bod ![]() ), kterým bude nositelka výslednice procházet. Výslednice ale nemusí mít v bodě
), kterým bude nositelka výslednice procházet. Výslednice ale nemusí mít v bodě ![]() svůj počátek - sílu lze po její nositelce libovolně posunovat.
svůj počátek - sílu lze po její nositelce libovolně posunovat.
Při právě popsané konstrukci vláknového obrazce je nutné dodržet základní pravidlo: tři úsečky, které ve vláknovém obrazci vytvářejí trojúhelník, se musejí v základním silovém obrazci protnout v jednom bodě.
Tak např. vektor síly ![]() , úsečka 3 a 2 z vláknového obrazce zobrazeného na obr. 153 tvoří trojúhelník. V základním silovém obrazci zobrazeném na obr. 154 se tyto tři přímky protínají v bodě
, úsečka 3 a 2 z vláknového obrazce zobrazeného na obr. 153 tvoří trojúhelník. V základním silovém obrazci zobrazeném na obr. 154 se tyto tři přímky protínají v bodě ![]() .
.
 |  |
| Obr. 152 | Obr. 153 |
 |
| Obr. 154 |
 |
| Obr. 155 |
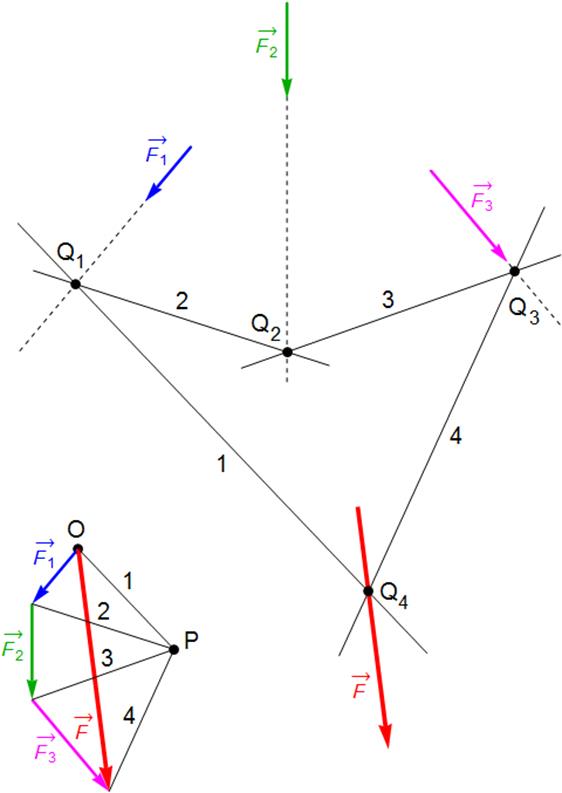
Výše popsaný postup lze využít také při řešení rovnováhy sil. Připojíme-li k dané soustavě sil sílu ![]() , která je stejně velká a opačně orientovaná ve srovnání s výslednicí dané soustavy sil
, která je stejně velká a opačně orientovaná ve srovnání s výslednicí dané soustavy sil ![]() , uvedli jsme danou soustavu sil (resp. těleso, na které tato soustava sil působí) do rovnováhy (resp. do rovnovážné polohy).
, uvedli jsme danou soustavu sil (resp. těleso, na které tato soustava sil působí) do rovnováhy (resp. do rovnovážné polohy).
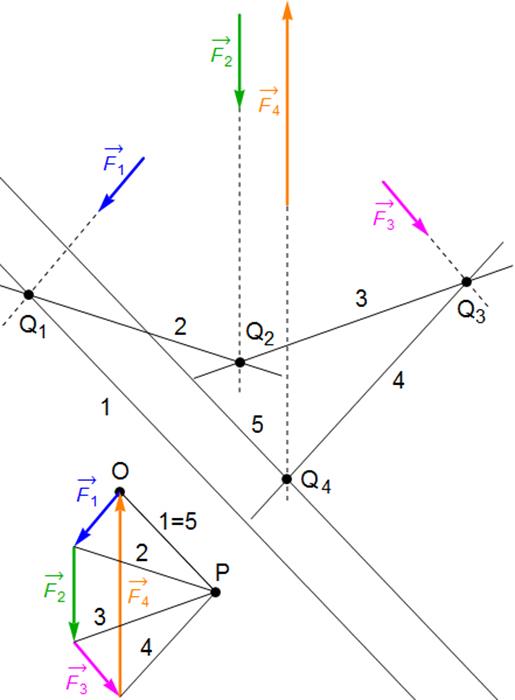
Může se stát, že výslednice sil vyjde nulová. To z vláknového obrazce poznáme tak, že koncový bod poslední skládané síly bude totožný s počátečním bodem první skládané síly, tj. s bodem O. V tom případě první a poslední vlákno vláknového obrazce splynou. V základním silovém obrazci se tato skutečnost projeví tak, že tato dvě vlákna jsou navzájem rovnoběžná. Tento případ ilustruje obr. 156. Silový obrazec je v tomto případě v jednom smyslu sám o sobě uzavřen.
To znamená, že silový obrazec lze projít ve směru šipek zakreslených sil tak, že vyjdeme z bodu O a zase se do bodu O vrátíme zpět. U silového obrazce zobrazeného např. na obr. 152 to neplatí: výslednice sil má opačný směr, než je směr „postupu obrazcem“.
Libovolný silový obrazec bude v jednom smyslu sám o sobě uzavřen, pokud výslednici skládaných sil nahradíme silou, která danou soustavu sil uvádí do rovnováhy.
V případě zobrazeném na obr. 156 tedy neexistuje výslednice zadaných sil a tyto síly způsobují otáčivý pohyb. Lze je tedy nahradit dvojicí sil.
Zadaná soustava sil tělesem nepohybuje přímočaře, ale pouze jím otáčí.
Dvojic sil, kterými lze zadanou soustavu sil nahradit, může být nekonečně mnoho. Závisí na ramenu dvojice sil (tj. vzdálenost nositelek obou sil) a na velikosti sil patřících do dané dvojice sil. Moment dvojice sil vzhledem k libovolnému bodu roviny musí být stejný jako moment zadaných sil vzhledem ke stejnému bodu roviny.
 |
| Obr. 156 |