Bayerova maska
Výrobci digitálních fotoaparátů se snažili snímací čipy upravit tak, aby fotografie vytvořené digitálními fotoaparáty byly z hlediska podání barev stejně kvalitní jako pohled lidským okem.
Podobnou cestou prošli i výrobci standardního kinofilmu, když se snažili od dob natočení prvního filmu filmový pás vylepšovat tak, aby co nejvěrněji zachytil snímanou realitu.
Filtr, který požadovaným způsobem upravil CCD snímač v digitálních fotoaparátech, vytvořil v roce 1976 v laboratořích firmy Kodak Bryce Bayer. Filtru se proto říká Bayerova maska (Bayer Mask). Bayer vycházel z faktu, že lidské oko je přibližně dvakrát více citlivé na světlo zelené barvy, než na světla zbývajících dvou barev (červené a zelené) RGB modelu. Proto Bayerova maska obsahuje pixely červené, zelené a modré barvy v poměru 1:2:1 (viz obr. 213).
Tento typ masky obsahují jak snímače DSLR, tak např. snímače mobilních telefonů, v nichž je zabudován fotoaparát.
CCD snímač obsahuje pixely, ale ty jsou schopné zaznamenat pouze intenzitu světla. Nezaznamenají ale barvu světla. Pokud tedy chceme pomocí CCD snímače zaznamenat barvu světla, je nutné před pixely předřadit barevné filtry.
Pixely jsou tedy barevně „slepé“ - „vidí“ pouze černobíle. Abychom „je naučili vidět barevně“, musíme použít barevné filtry.
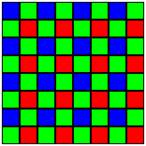 |
| Obr. 213 |
To tedy znamená, že např. snímač obsahující 6 milionu pixelů (6 mega), nad kterým bude Bayerova maska, bude mít 1,5 milionu pixelů citlivých na červené světlo, 3 miliony pixelů citlivých na zelené světlo a 1,5 milionu pixelů citlivých na modré světlo.
Průchod světla Bayerovou maskou a barevný vzor, který se zaznamená na CCD snímači, je zobrazen na obr. 214. Maska (a tedy i jednotlivé pixely snímače) je citlivá pouze na základní barvy RGB modelu, a proto je uvažován průchod pouze těchto tří základních barev.
Čtverečky znázorňující jednotlivé pixely by měly být ve spodní části obr. 214 zobrazeny černě, protože na ně nedopadá žádné světlo. Z důvodu přehlednosti jsou ale zobrazeny bíle.
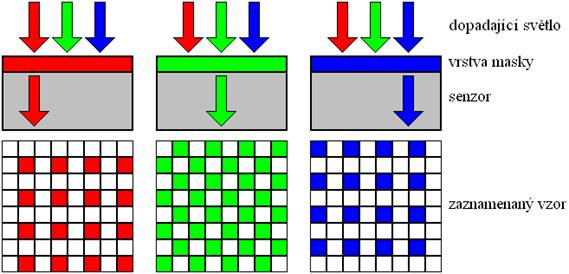 |
| Obr. 214 |
Získání plnohodnotné (tj. barevné) informace se pak provádí pomocí metod interpolace. Ze čtyř navzájem nejbližších pixelů senzoru se dopočítá jeden pixel obrazu. Další pixel obrazu se počítá z další čtveřice pixelů, která je oproti minulé posunuta o jeden pixel (resp. o jednu dvojici pixelů - viz obr. 215). Každý pixel snímače (kromě těch na okrajích snímače) je tedy použit celkem čtyřikrát.
Tato metoda tedy odpovídá bilineární interpolaci. Běžně se používá např. i bikubická interpolace (výpočet se pak provádí na základě 16 pixelů rozložených v matici 4 ![]() 4 pixely) nebo další metody interpolace.
4 pixely) nebo další metody interpolace.
Z každých čtyř jednobarevných pixelů (které mohou být ale také černé, pokud na ně světlo nedopadlo), se spočítá jakási průměrná hodnota, která bude udávat barvu jednoho pixelu obrazu, který je zobrazen na displeji fotoaparátu nebo později na monitoru počítače.
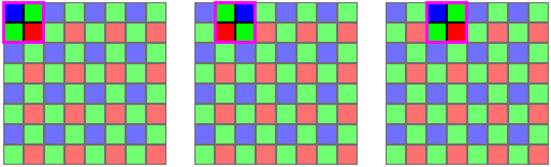 |
| Obr. 215 |
Pokud budeme uvažovat snímač jako obdélník, jehož dvě na sebe kolmé strany budou mít na své délce umístěno m pixelů a n pixelů, tak bychom očekávali celkový počet ![]() pixelů. Nepoužijeme-li další opravy a korekce, bude mít vlivem použité interpolace výsledný obraz v paměti fotoaparátu nebo počítače rozlišení obrazu pouze
pixelů. Nepoužijeme-li další opravy a korekce, bude mít vlivem použité interpolace výsledný obraz v paměti fotoaparátu nebo počítače rozlišení obrazu pouze ![]() pixelů.
pixelů.
„Použitelné“ pixely budou ty, které např. na obr. 213 leží na průsečích vnitřních stran čtverců představujících jednotlivé pixely.
Struktura Bayerovy masky ovlivňuje i artefakty obrazu, mezi které patří např. šum obrazu nebo moaré. Nejméně šumu obsahuje zelený kanál nesoucí informaci o zelené barvě. Důvodem je fakt, že informací o zelené barvě je dvojnásobné množství, než o ostatních barvách RGB modelu. Tak mají pixely citlivé na zelenou barvu efektivně větší plochu, než pixely citlivé na červenou barvu a pixely citlivé na modrou barvu.
Vzhledem k tomu, že jsou senzory pro červenou barvu a modrou barvu relativně daleko od sebe, je systém využívající Bayerovu masku náchylný ke vzniku barevného moaré.
Jednotlivé pixely jsou od sebe dále, a proto bude „duhový“ vlivem moaré i obraz, který by jinak nijak poškozen nebyl.
U moderních snímačů je problém barevného moaré řešen pomocí tzv. OLPF (Optical Low-Pass Filter) vrstvy nanesené na snímači. Tato vrstva odstraňuje detaily obrazu takové úrovně, které by způsobily vlivem Bayerovy masky barevné moaré nebo jiný artefakt obrazu. OLPF funguje tak, že ve vertikálním směru i v horizontálním směru snižuje ostrost, která odpovídá přibližně vzdálenosti dvou nejbližších senzorů citlivých na zelenou barvu. Větší rozsah by redukoval příliš mnoho detailů, nižší by byl neúčinný. OLPF redukuje moaré zejména v zeleném kanálu a v jasové složce. Červený kanál a modrý kanál jsou ovlivněny minimálně; spoléhá se na to, že stačí redukovat moaré v zeleném kanálu a v jasové složce a tím klesne celková úroveň moaré na přijatelnou hodnotu.
Jednotlivé barevné senzory spolu nesousedí zcela těsně, ale jsou mezi nimi mezery. Tyto mezery pohlcují nebo odrážejí dopadající světlo. Část na senzor dopadajícího světla tedy není vůbec zachycena. Navíc takto nespojité snímání může zvýšit výskyt aliasingu ve výsledném obrazu. Tyto nedostatky se řeší pomocí tzv. mikročoček, na kterých nastává lom světla. Takto lomené světlo, které by bez použití mikročoček dopadlo do mezer mezi senzory, dopadá do nejbližšího senzoru.
Důvod, proč se používají mikročočky, je schématicky zobrazen na obr. 216. Pokud se mirkočočka nepoužije, dopadá světlo i na část senzoru, která není citlivá na světlo (mezery mezi jednotlivými senzory, elektronika senzoru, …). Pokud se mikročočka použije, zachytí senzory více světla; snímaný obraz tak bude kvalitnější.
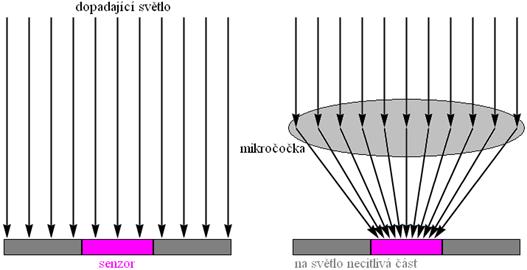 |
| Obr. 216 |
Řešení problému s mezery mezi senzory a s použitím mikročoček řeší každá firmy vyrábějící senzory různě. Jedno z řešení, které používá ve svých senzorech firma Nikon, je zobrazeno na obr. 217. Kromě mikročoček jsou použita i dichroická zrcadla (polopropustná zrcadla), která rozdělují dopadající světlo na jednotlivé základní barvy RGB modelu. Světlo každé barvy pak dopadá na příslušný senzor a informace je dále zpracovávána.
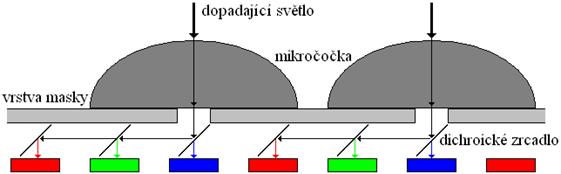 |
| Obr. 217 |
Kromě Bayerovy masky existují další technologie, jak přiblížit obraz snímaný DSLR nebo kamerou obrazu, který vidí lidské oko.
Jedna z alternativních technologií využívá různé citlivosti křemíku, který patří mezi polovodiče a ze kterého se většinou snímače vyrábějí, na světlo různých vlnových délek. Čip je pak tvořen třemi na sebe položenými křemíkovými destičkami, z nichž každá je citlivá na jednu základní barvu RGB modelu. Tak získáme obraz také ve třech snímačích najednou, ale nebude nutné již žádné pixely dopočítávat - informace o všech třech základních barvách budou totiž zaznamenané v plném rozlišení.